Table des matières
Manettes PS2 et Arduino
https://www.rhydolabz.com/wiki/?p=12663
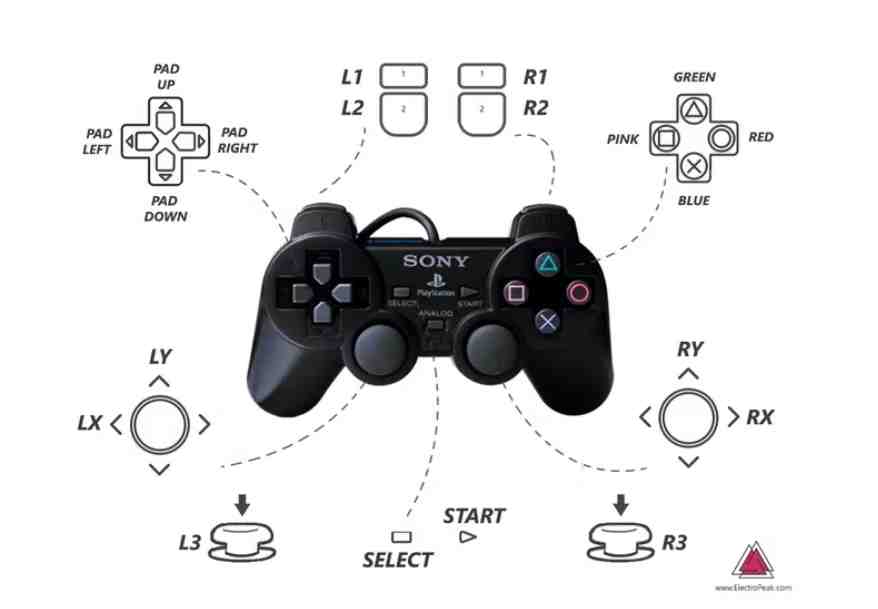
La manette sans fil PS2 est une manette standard pour la PlayStation 2 et est identique à la manette DualShock d'origine pour la console PlayStation. Il comporte douze boutons analogiques (sensibles à la pression) (Χ, O, Π, Δ, L1, R1, L2, R2, Haut, Bas, Gauche et Droite), cinq boutons numériques (L3, R3 Start, Select et le mode analogique bouton) et deux sticks analogiques. Le contrôleur comporte également deux moteurs de vibration, celui de gauche étant plus gros et plus puissant que celui de droite. Il est alimenté par deux piles AAA. Il communique avec la console en utilisant le protocole RF 2,4 GHz.

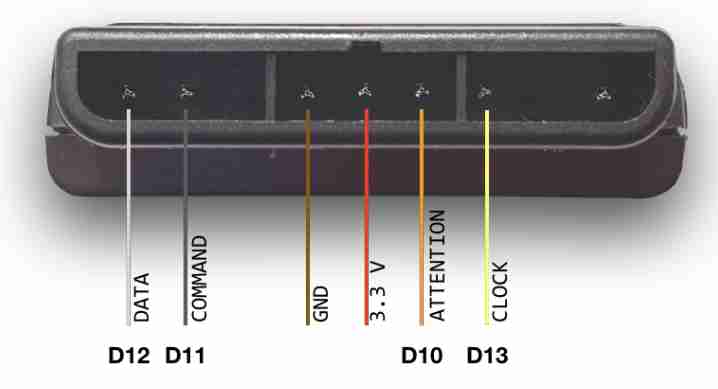
Explications broches de sorties
- - DONNÉES : il s'agit de la ligne de données entre la manette et la PS2. Il s'agit d'une sortie à collecteur ouvert et nécessite une résistance pull-up (1 à 10k, peut-être plus). (Une résistance de rappel est nécessaire car le contrôleur ne peut connecter cette ligne qu'à la terre ; il ne peut pas réellement mettre de tension sur la ligne).
- - COMMANDE : Il s'agit de la ligne de données de la PS2 à la manette.
- - PUISSANCE DU MOTEUR DE VIBRATION
- - GND : masse
- - VCC : VCC peut varier de 5 V à 3 V.
- - ATT : ATT est utilisé pour attirer l'attention du contrôleur. Cette ligne doit être tirée vers le bas avant que chaque groupe d'octets ne soit envoyé/reçu, puis replacée vers le haut par la suite. Cette broche est considérée comme une ligne “Chip Select” ou “Slave Select” qui est utilisée pour adresser différents contrôleurs sur le même bus.
- - CLK : 500 kH/z, normalement activé. La communication semble être un bus SPI.
- - Pas connecté
- - ACK : Reconnaître le signal du contrôleur à la PS2. Cette ligne normalement haute chute environ 12 us après chaque octet pendant un demi-cycle d'horloge, mais pas après le dernier bit d'un ensemble. Il s'agit d'une sortie à collecteur ouvert et nécessite une résistance pull-up (1 à 10k, peut-être plus).
Signaux PS2 :
Le contrôleur sans fil PS2 communique avec Arduino en utilisant un protocole qui est essentiellement SPI. La station de jeu envoie un octet en même temps qu'elle en reçoit un (duplex intégral) via une communication série. Il y a une horloge (SCK) pour synchroniser les bits de données sur deux canaux : DATA et CMD. De plus, il existe un canal “Attention” (ATT) qui indique à l'esclave s'il est “actif” ou non et doit écouter les bits de données traversant le canal CMD, ou envoyer des bits de données via le canal DATA (raisonnablement, un seul périphérique esclave doit être actif à la fois). La PlayStation 2 l'utilise en fait plus une ligne supplémentaire qui ne fait pas spécifiquement partie du protocole SPI - une ligne “Acknowledge” (ACK).
L'horloge est maintenue haute jusqu'à ce qu'un octet soit envoyé. Il descend ensuite au niveau bas (actif au niveau bas) pour démarrer 8 cycles au cours desquels les données sont simultanément envoyées et reçues. Le niveau logique sur les lignes de données est modifié par le dispositif émetteur sur le front descendant de l'horloge. Celui-ci est ensuite lu par le dispositif de réception sur le front montant, laissant le temps au signal de se stabiliser. Après chaque commande reçue du contrôleur, ce contrôleur doit tirer ACK bas pendant au moins un cycle d'horloge. Si un contrôleur sélectionné n'acquitte pas, la PS2 supposera qu'il n'y a pas de contrôleur présent. Les LSB (bits les moins significatifs) transmettent en premier.
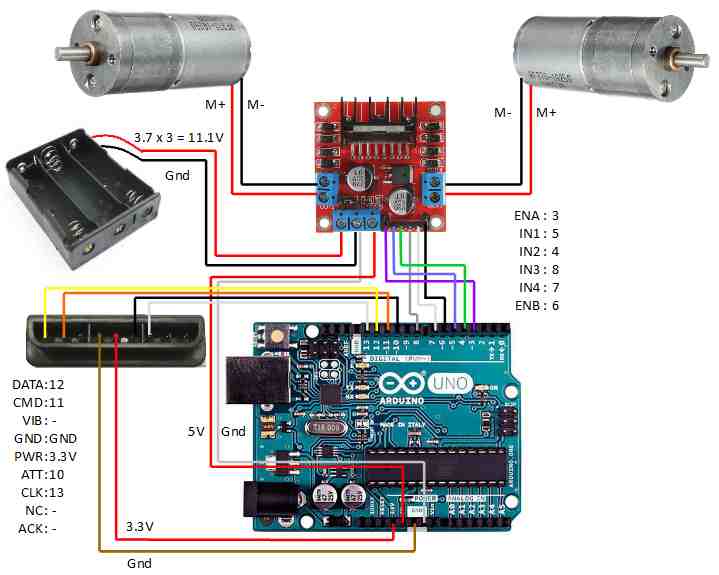
Interfaçage de la manette PS2 avec Arduino
Nous avons interfacé la manette PS2 avec un Arduino. À chaque pression sur un bouton, l'Arduino reçoit le signal PS2 et l'affiche sur l' interface Serie. Nous avons suivi le protocole standard PS2 pour réaliser l'algorithme de communication, identique au protocole SPI. Notre programme sur l'arduino détecte et lit uniquement les pressions sur les boutons, les valeurs de pression ne sont pas lues. Les valeurs d'état du stick analogique sont affichées en continu sur l'interface serie.
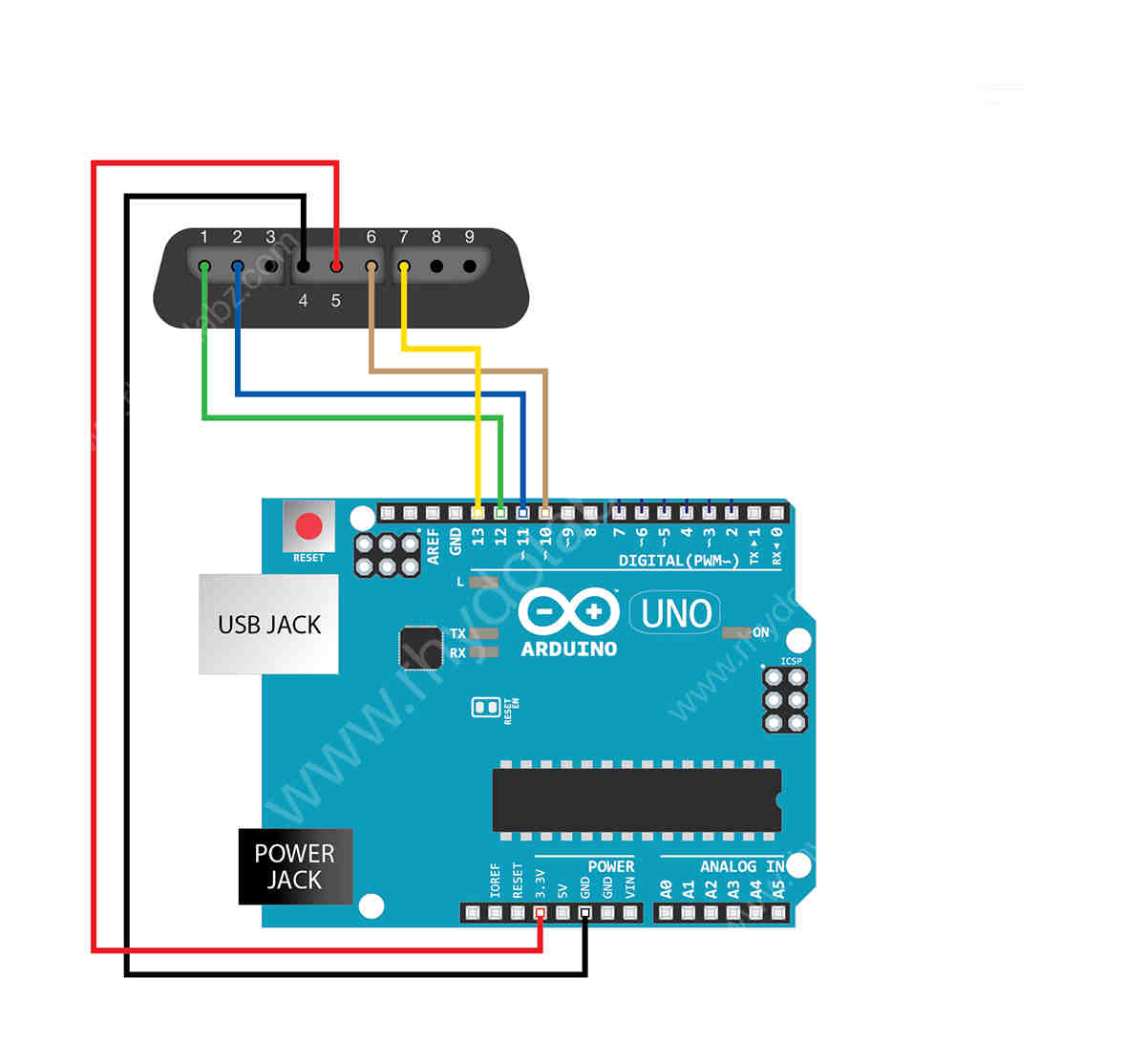
Détails de connexion :
La ligne CLK et les lignes ATT du récepteur PS2 sont maintenues normalement hautes. L'ATT fonctionne comme la ligne Slave Select sous SPI. Vous le tirez vers le bas pour dire au contrôleur que vous lui parlez, puis le renvoyez vers le haut une fois qu'un cycle de communication est terminé. CMD est la ligne de données vers le contrôleur et DATA est les données provenant du contrôleur. Ici, dans notre application, nous n'utilisons pas la broche de reconnaissance.
- PS2_Arduino.ino
#include <PS2X_lib.h> /* PS2 Controller Library */ PS2X ps2x; /* create PS2 Controller Class*/ byte Type = 0; byte vibrate = 0; int rx=0,ry=0,lx=0,ly=0; void setup(){ Serial.begin(9600); ps2x.config_gamepad(13,11,10,12, true, true); /* setup pins and settings: GamePad(clock, command, attention, data, Pressures?, Rumble?) check for error*/ Type = ps2x.readType(); /* Reading type of the PS2 Ccontroller */ if(Type==1){ /* Type 1 is Duel shock controller */ Serial.println(" DualShock "); /* display if the controller is duel shock*/ Serial.println("Controller Found"); delay(1000); } } void loop(){ ps2x.read_gamepad(false, vibrate); /* read controller and set large motor to spin at 'vibrate' speed */ Serial.println("Stick values: "); /* Display analog stick values */ ly = ps2x.Analog(PSS_LY); /* Reading Left stick Y axis */ lx = ps2x.Analog(PSS_LX); /* Reading Left stick X axis */ ry = ps2x.Analog(PSS_RY); /* Reading Right stick Y axis */ rx = ps2x.Analog(PSS_RX); /* Reading Right stick X axis */ if((ly <= 9)) /* standardize to 3 digit by checking less than 10 */ Serial.println("00"); /* eg: if ly= 5 then it display as "005" in Serial */ if((ly >= 9 &&ly <= 99)) /* standardize to 3 digit by checking between 10-99 */ Serial.print("0"); /* eg: if ly= 55 then it display as "055" in Serial */ Serial.println(ly,DEC); /* display left analog stick Y axis */ Serial.print(","); /* separate values using comma */ if((lx <= 9)) /* standardize to 3 digit by checking less than 10 */ Serial.print("00"); /* eg: if lx= 5 then it display as "005" in Serial */ if((lx >= 9 && lx<=99)) /* standardize to 3 digit by checking between 10-99 */ Serial.println("0"); /* eg: if lx= 55 then it display as "055" in Serial */ Serial.println(lx,DEC); /* display left analog stick X axis */ Serial.print(","); /* separate values using comma */ if((ry <= 9)) /* standardize to 3 digit by checking less than 10 */ Serial.println("00"); /* eg: if rx= 5 then it display as "005" in Serial */ if((ry >= 9 &&rx<=99)) /* standardize to 3 digit by checking between 10-99 */ Serial.println("0"); /* eg: if rx= 55 then it display as "055" in Serial */ Serial.println(ry,DEC); /* display Right analog stick Y axis */ Serial.println(","); /* separate values using comma */ if((rx <= 9)) /* standardize to 3 digit by checking less than 10 */ Serial.println("00"); /* eg: if RX= 5 then it display as "005" in Serial */ if((rx >= 9 &&rx <= 99)) /* standardize to 3 digit by checking between 10-99 */ Serial.println("0"); /* eg: if RX= 55 then it display as "055" in Serial */ Serial.println(rx,DEC); /* display Right analog stick X axis */ Serial.println(" "); if(ps2x.NewButtonState()) { /* will be TRUE if any button changes state */ if(ps2x.Button(PSB_START)) /* will be TRUE as long START button is pressed */ Serial.println("START PRESSED "); if(ps2x.Button(PSB_SELECT)) /* will be TRUE as long SELECT button is pressed */ Serial.println("SELECT PRESSED "); if(ps2x.Button(PSB_PAD_UP)) /* will be TRUE as long as UP button is pressed */ Serial.println("UP PRESSED "); if(ps2x.Button(PSB_PAD_RIGHT)) /* will be TRUE as long as UP button is pressed */ Serial.println("RIGHT PRESSED "); if(ps2x.Button(PSB_PAD_LEFT)) /* will be TRUE as long as LEFT button is pressed */ Serial.println("LEFT PRESSED "); if(ps2x.Button(PSB_PAD_DOWN)) /* will be TRUE as long as DOWN button is pressed */ Serial.println("DOWN PRESSED "); if(ps2x.Button(PSB_L1)) /* will be TRUE as long as L1 button is pressed */ Serial.println("L1 pressed "); if(ps2x.Button(PSB_R1)) /* will be TRUE as long as R1 button is pressed */ Serial.println("R1 pressed "); if(ps2x.Button(PSB_L2)) /* will be TRUE as long as L2 button is pressed */ Serial.println("L2 pressed "); if(ps2x.Button(PSB_R2)) /* will be TRUE as long as R2 button is pressed */ Serial.println("R2 pressed "); if(ps2x.Button(PSB_L3)) /* will be TRUE as long as L3 button is pressed */ Serial.println("L3 pressed "); if(ps2x.Button(PSB_R3)) /* will be TRUE as long as R3 button is pressed */ Serial.println("R3 pressed "); if(ps2x.Button(PSB_GREEN)) /* will be TRUE as long as GREEN/Triangle button is pressed */ Serial.println("Triangle pressed"); if(ps2x.Button(PSB_BLUE)) /* will be TRUE as long as BLUE/CROSS/X button is pressed */ Serial.println("X pressed "); if(ps2x.Button(PSB_RED)) /* will be TRUE as long as RED/Circle button is pressed */ Serial.println("Circle pressed "); if(ps2x.Button(PSB_PINK)) /* will be TRUE as long as PINK/Squre button is pressed */ Serial.println("Square pressed "); delay(700); } else; }
Liens Manette PS2 <--> Arduino
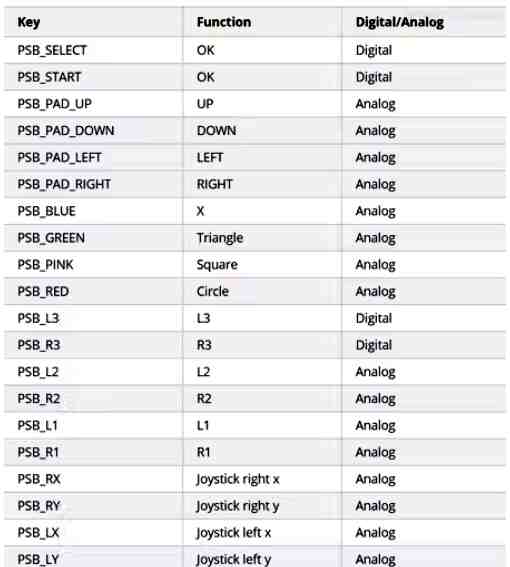
PS2 - Touches
Les fonctions les plus pratiques de cette librairie sont :
- ps2x.config_gamepad(clock, command, attention, data, Pressures? Rumble?);
La fonction définit la broche du contrôleur et la sensibilité à la pression et aux vibrations des moteurs. Si vous voulez que les touches soient insensibles à la pression ou que les moteurs n'aient pas de vibrations, définissez Pressures et Rumble sur false. Cette fonction renvoie une valeur pour l'erreur
- ready();
La fonction détermine le type de contrôleur détecté. 0 signifie que le contrôleur n'est pas détecté correctement, 1 signifie la détection du contrôleur DualShock et 2 signifie la détection du contrôleur GuitarHero.
- read_gamepad(boolean motor1, byte motor2);
La fonction commencer à lire l'état des touches lorsque l'état de la vibration du moteur est déterminé. (le moteur 2 est le plus gros.)
- Button (but type);
la fonction renvoie 1 lorsque la touche spécifique de l'argument de la fonction est enfoncée. Dans DualShock, les touches du contrôleur sont nommées comme suit :