
Ceci est une ancienne révision du document !
Table des matières
MX1508
Caractéristiques du module pilote de moteur MX1508
Le pilote MX1508 est l'un des pilotes les moins chers pour faire fonctionner des moteurs à courant continu avec un courant maximum de 2 ampères. Les petites dimensions et la configuration simple sont les caractéristiques positives de ce module.
Le MX1508 est un pilote de moteur à double pont complet qui permet de connecter simultanément deux moteurs à courant continu.
Ce pilote dispose d'un circuit de protection contre la température qui désactive le pilote en cas de surchauffe. Les fonctionnalités de ce module sont les suivantes :
- Plage de tension de fonctionnement : 2 à 9,6 V CC.
- Courant de sortie maximum : 1,5 A (crête 2 A)
- Température maximale de fonctionnement : 15 °C
Fiche technique
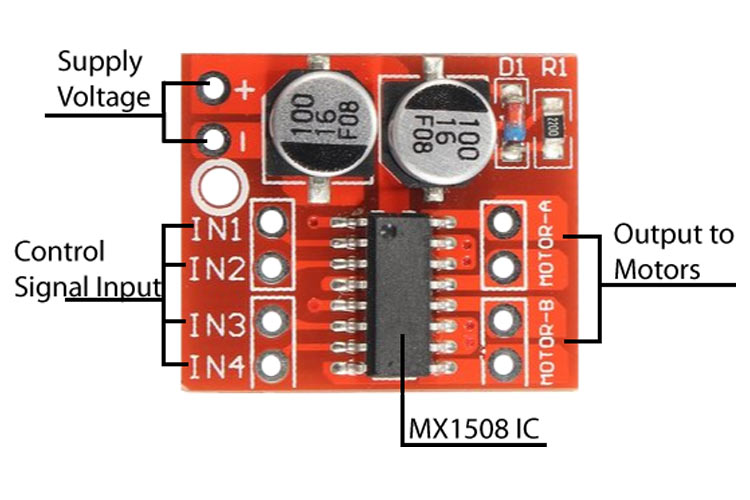
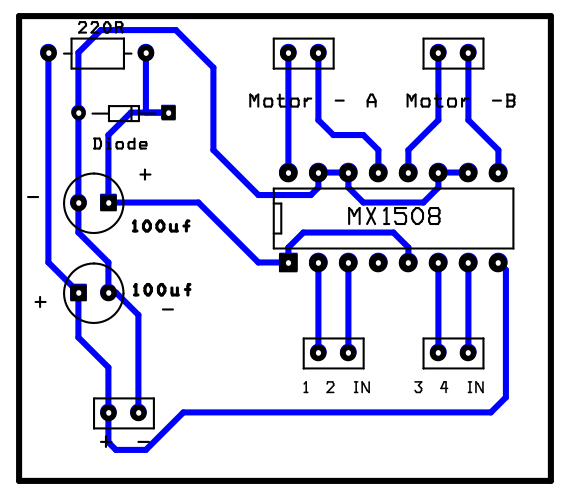
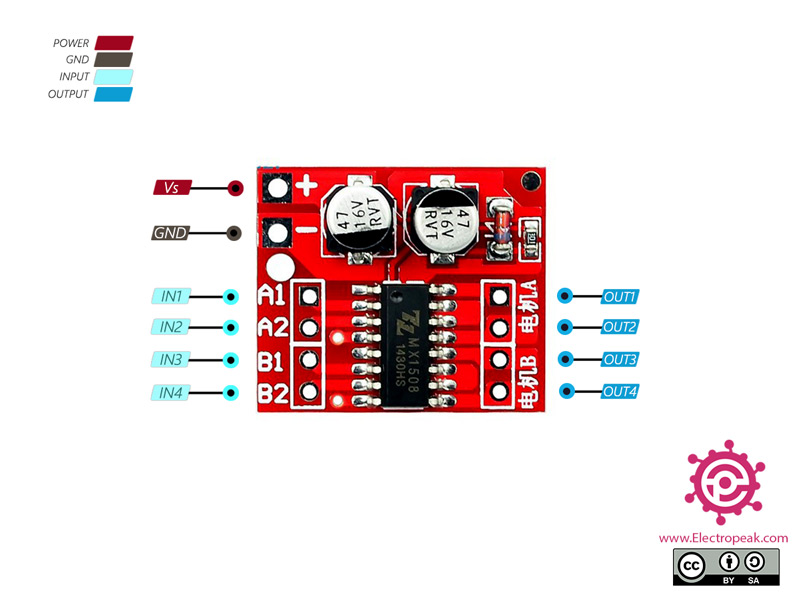
Brochage du module pilote de moteur MX1508
Ce capteur possède 10 broches :
- Vs : Alimentation du module (entrée)
- GND : terre
- IN1 : Entrée 1
- IN2 : Entrée 2
- IN3 : Entrée 3
- IN4 : Entrée 4
- SORTIE1 : Sortie 1
- SORTIE2 : Sortie 2
- OUT3 : Sortie 3
- OUT4 : Sortie 4
Exemple d 'utilisation
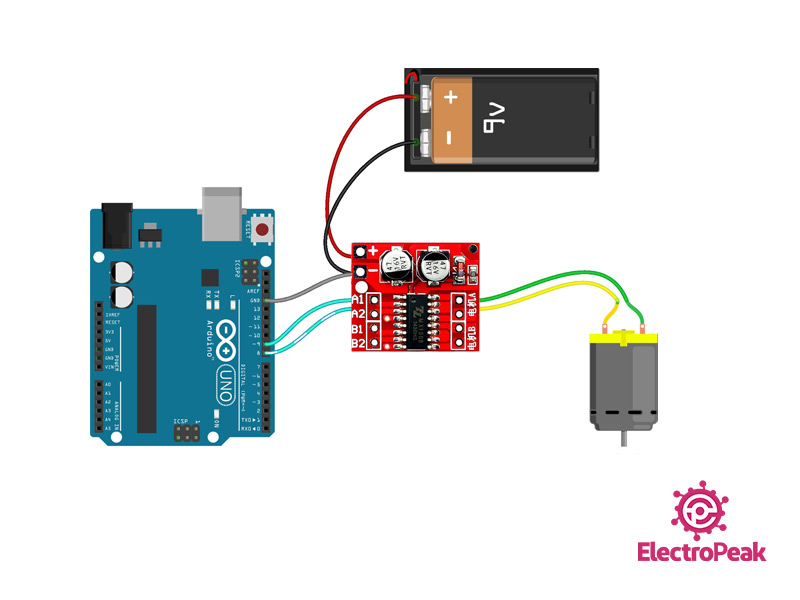
Code arduino Exemple
- exemple_mx1508.ino
/* MX1508 DC MOTOR DRIVER MODULE modified on 25 Sep 2020 by Saeed Olfat @ Electropeak Home */ void setup() { pinMode(8, OUTPUT); //IN2 pinMode(9, OUTPUT); //IN1 } void loop() { // Full speed forward digitalWrite(8, HIGH); digitalWrite(9, LOW); delay(3000); // Full speed backward digitalWrite(8, LOW); digitalWrite(9, HIGH); delay(3000); // 0 to 100% speed in forward mode for (int i=0;i<256;i++) { digitalWrite(8, HIGH); analogWrite(9, i); delay(20); } delay(50); // 0 to 100% speed in backward mode for (int i=255;i<0;i--) { digitalWrite(8, LOW); analogWrite(9, i); delay(20); } delay(50); }
Comme vous pouvez le voir dans le code, le moteur avance d'abord pendant 3 secondes et recule pendant 3 secondes. Ensuite le moteur s'arrête et sa vitesse augmente de 0 à 100% en marche avant avec une accélération constante, puis le même mouvement s'effectue en marche arrière.