
Table des matières
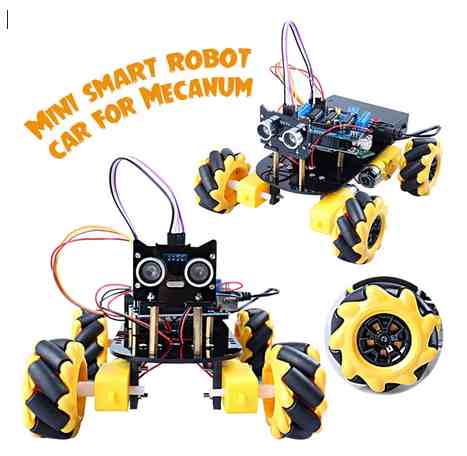
Robot à roues Mecanum
Qu'est-ce que Mecanum Wheel?
- La roue Mecanum est une roue omnidirectionnelle qui permet au véhicule robotique de se déplacer de chaque côté et le mouvement général avant et arrière. Bengt Erland Ilon a développé l'idée de roue Mecanum lorsqu'il était employé comme ingénieur dans une entreprise en Suède. Il a breveté l'idée aux États-Unis le 13 novembre 1972. L'autre nom répandu est la roue suédoise ou roue Ilon, d'après le nom du fondateur.
Conception du robot à roues Mecanum
La roue Mecanum est centrée sur une roue infatigable qui est reliée obliquement à toute la circonférence de sa jante avec un jeu de rouleaux externes caoutchoutés. Habituellement, ces ensembles de rouleaux externes caoutchoutés ont chacun un axe de rotation par rapport au plan de roue autour de 45 ° et avec la ligne d'axe autour de 45 °.
Dans chaque robot de roue Mecanum, sa roue a son groupe motopropulseur et est indépendamment de type non directionnel. Le groupe motopropulseur est chargé de générer une force de propulsion qui maintient un angle de 90 ° avec l'axe du rouleau pendant le mouvement de rotation qui peut être divisée en ses composantes vectorielles longitudinales et transversales.
Principe de commande des roues mecanum

La configuration typique d'un robot à roues Mecanum a une disposition à quatre roues, ce qui est évident dans un exemple de robots mobiles omnidirectionnels appelé URANUS. Il a des rouleaux latéraux gauche et droit alternés avec des axes parallèles à la diagonale du châssis du véhicule au sommet de la roue. L'un des robots à roues Mecanum: URANUS est illustré ci-dessous.

Les robots à roues Mecanum pour se déplacer avec des exigences de vitesse minimales. Par example:
- Conduire les 4 roues à la même vitesse dans la même direction peut conduire à un mouvement d'avance / recul, car les vecteurs de force longitudinale s'additionneront, bien que les vecteurs transversaux s'annulent.
- Entraînement (toutes à la même vitesse) les deux roues dans un sens d'un côté et de l'autre dans le sens opposé. Cela se traduirait par la rotation stationnaire du véhicule lorsque le les vecteurs transversaux s'annulent tandis que les vecteurs longitudinaux les vecteurs s'apparient pour produire un couple autour de l'axe vertical central du véhicule.
- Pour vous déplacer latéralement, faites tourner les roues diagonales dans le même sens à la même vitesse et les deux autres roues diagonales seront à l'opposé. Cela entraîne l'ajout de vecteurs transversaux tout en annulant les vecteurs longitudinaux.
Les combinaisons de différents types de mouvements indépendants des roues dans le robot à roues Mecanum, aidées avec une certaine quantité de rotation, facilitent le mouvement du véhicule dans toutes les directions possibles.
Applications du robot à roues Mecanum
Le mouvement omnidirectionnel et la maniabilité extrême dans les environnements encombrés fournis par Mecanum Wheeled Robot ont trouvé leurs applications dans le domaine suivant:
- Le robot à roues Mecanum est utilisé dans diverses activités militaires et missions de recherche et de sauvetage.
- Mecanum Wheeled Robot est également utile dans les explorations planétaires, par exemple MarsCruiserOne, qui est un rover conceptuel habitable pour les futures missions spatiales.
- Mecanum Wheeled Robot est également utilisé dans les opérations minières, ce qui nécessite une bonne mobilité dans les espaces confinés.
- Les chariots élévateurs robotisés à roues Mecanum sont utilisés pour le transport de marchandises pour sa mobilité efficace et la gestion des espaces d'entrepôt.
- Les robots à roues Mecanum sont utilisés dans des projets de fauteuils roulants innovants, par exemple OMNI, car Mecanum Wheeled Robot facilite une mobilité élevée dans un environnement complexe et des degrés plus élevés d'indépendance.
Calculs savants ....
Cinématique d'une voiture à roue mecanum
Projet IMA 4 : Commande d'un robot mobile holonome et manipulateur
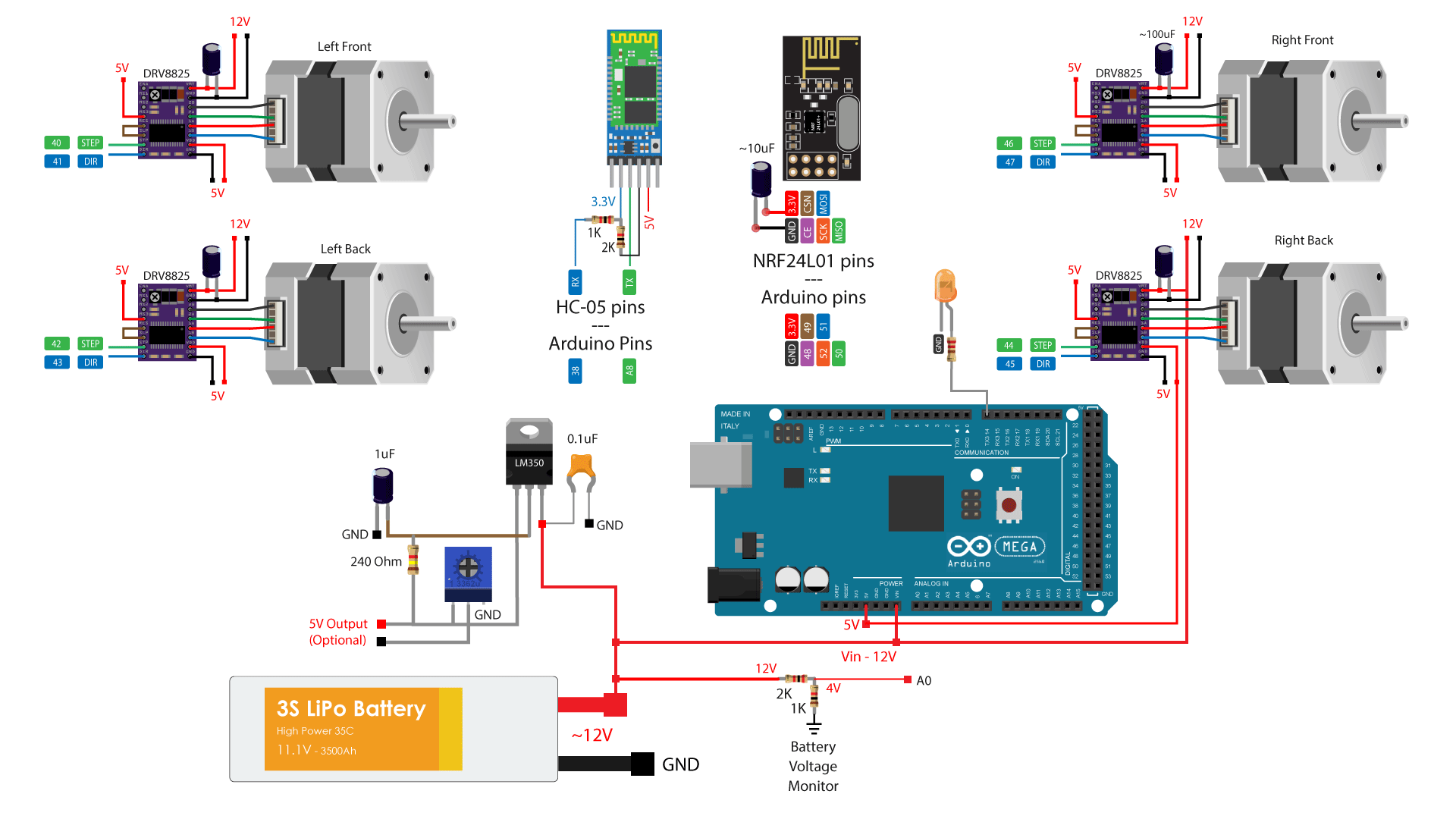
Arduino roue mecanum
Programmes
rouemecanumarduino.ino
- rouemecanumarduino.ino
// à Tester ? /* === Arduino Mecanum Wheels Robot === Radio control with NRF24L01 by Dejan, www.HowToMechatronics.com Libraries: RF24, https://github.com/tmrh20/RF24/ AccelStepper by Mike McCauley: http://www.airspayce.com/mikem/arduino/AccelStepper/index.html */ #include <SPI.h> #include <nRF24L01.h> #include <RF24.h> #include <AccelStepper.h> RF24 radio(48, 49); // nRF24L01 (CE, CSN) const byte address[6] = "00001"; unsigned long lastReceiveTime = 0; unsigned long currentTime = 0; // Define the stepper motors and the pins the will use AccelStepper LeftBackWheel(1, 42, 43); // (Type:driver, STEP, DIR) - Stepper1 AccelStepper LeftFrontWheel(1, 40, 41); // Stepper2 AccelStepper RightBackWheel(1, 44, 45); // Stepper3 AccelStepper RightFrontWheel(1, 46, 47); // Stepper4 int wheelSpeed = 1500; // Max size of this struct is 32 bytes - NRF24L01 buffer limit struct Data_Package { byte j1PotX; byte j1PotY; byte j1Button; byte j2PotX; byte j2PotY; byte j2Button; byte pot1; byte pot2; byte tSwitch1; byte tSwitch2; byte button1; byte button2; byte button3; byte button4; }; Data_Package data; //Create a variable with the above structure void setup() { // Set initial seed values for the steppers LeftFrontWheel.setMaxSpeed(3000); LeftBackWheel.setMaxSpeed(3000); RightFrontWheel.setMaxSpeed(3000); RightBackWheel.setMaxSpeed(3000); radio.begin(); radio.openReadingPipe(0, address); radio.setAutoAck(false); radio.setDataRate(RF24_250KBPS); radio.setPALevel(RF24_PA_LOW); radio.startListening(); // Set the module as receiver Serial.begin(115200); } void loop() { // Check whether we keep receving data, or we have a connection between the two modules currentTime = millis(); if ( currentTime - lastReceiveTime > 1000 ) { // If current time is more then 1 second since we have recived the last data, that means we have lost connection resetData(); // If connection is lost, reset the data. It prevents unwanted behavior, for example if a drone jas a throttle up, if we lose connection it can keep flying away if we dont reset the function } // Check whether there is data to be received if (radio.available()) { radio.read(&data, sizeof(Data_Package)); // Read the whole data and store it into the 'data' structure lastReceiveTime = millis(); // At this moment we have received the data } // Set speed - left potentiometer wheelSpeed = map(data.pot1, 0, 255, 100, 3000); if (data.j1PotX > 150) { moveSidewaysLeft(); } else if (data.j1PotX < 100) { moveSidewaysRight(); } else if (data.j1PotY > 160) { moveForward(); } else if (data.j1PotY < 100) { moveBackward(); } else if (data.j2PotX < 100 & data.j2PotY > 160) { moveRightForward(); } else if (data.j2PotX > 160 & data.j2PotY > 160) { moveLeftForward(); } else if (data.j2PotX < 100 & data.j2PotY < 100) { moveRightBackward(); } else if (data.j2PotX > 160 & data.j2PotY < 100) { moveLeftBackward(); } else if (data.j2PotX < 100) { rotateRight(); } else if (data.j2PotX > 150) { rotateLeft(); } else { stopMoving(); } // Execute the steps LeftFrontWheel.runSpeed(); LeftBackWheel.runSpeed(); RightFrontWheel.runSpeed(); RightBackWheel.runSpeed(); // Monitor the battery voltage int sensorValue = analogRead(A0); float voltage = sensorValue * (5.0 / 1023.00) * 3; // Convert the reading values from 5v to suitable 12V i // If voltage is below 11V turn on the LED if (voltage < 11) { digitalWrite(led, HIGH); } else { digitalWrite(led, LOW); } } void moveForward() { LeftFrontWheel.setSpeed(wheelSpeed); LeftBackWheel.setSpeed(wheelSpeed); RightFrontWheel.setSpeed(wheelSpeed); RightBackWheel.setSpeed(wheelSpeed); } void moveBackward() { LeftFrontWheel.setSpeed(-wheelSpeed); LeftBackWheel.setSpeed(-wheelSpeed); RightFrontWheel.setSpeed(-wheelSpeed); RightBackWheel.setSpeed(-wheelSpeed); } void moveSidewaysRight() { LeftFrontWheel.setSpeed(wheelSpeed); LeftBackWheel.setSpeed(-wheelSpeed); RightFrontWheel.setSpeed(-wheelSpeed); RightBackWheel.setSpeed(wheelSpeed); } void moveSidewaysLeft() { LeftFrontWheel.setSpeed(-wheelSpeed); LeftBackWheel.setSpeed(wheelSpeed); RightFrontWheel.setSpeed(wheelSpeed); RightBackWheel.setSpeed(-wheelSpeed); } void rotateLeft() { LeftFrontWheel.setSpeed(-wheelSpeed); LeftBackWheel.setSpeed(-wheelSpeed); RightFrontWheel.setSpeed(wheelSpeed); RightBackWheel.setSpeed(wheelSpeed); } void rotateRight() { LeftFrontWheel.setSpeed(wheelSpeed); LeftBackWheel.setSpeed(wheelSpeed); RightFrontWheel.setSpeed(-wheelSpeed); RightBackWheel.setSpeed(-wheelSpeed); } void moveRightForward() { LeftFrontWheel.setSpeed(wheelSpeed); LeftBackWheel.setSpeed(0); RightFrontWheel.setSpeed(0); RightBackWheel.setSpeed(wheelSpeed); } void moveRightBackward() { LeftFrontWheel.setSpeed(0); LeftBackWheel.setSpeed(-wheelSpeed); RightFrontWheel.setSpeed(-wheelSpeed); RightBackWheel.setSpeed(0); } void moveLeftForward() { LeftFrontWheel.setSpeed(0); LeftBackWheel.setSpeed(wheelSpeed); RightFrontWheel.setSpeed(wheelSpeed); RightBackWheel.setSpeed(0); } void moveLeftBackward() { LeftFrontWheel.setSpeed(-wheelSpeed); LeftBackWheel.setSpeed(0); RightFrontWheel.setSpeed(0); RightBackWheel.setSpeed(-wheelSpeed); } void stopMoving() { LeftFrontWheel.setSpeed(0); LeftBackWheel.setSpeed(0); RightFrontWheel.setSpeed(0); RightBackWheel.setSpeed(0); } void resetData() { // Reset the values when there is no radio connection - Set initial default values data.j1PotX = 127; data.j1PotY = 127; data.j2PotX = 127; data.j2PotY = 127; data.j1Button = 1; data.j2Button = 1; data.pot1 = 1; data.pot2 = 1; data.tSwitch1 = 1; data.tSwitch2 = 1; data.button1 = 1; data.button2 = 1; data.button3 = 1; data.button4 = 1; }
Robot-Arduino_Mecanum000.ino
- Robot-Arduino_Mecanum000.ino
//A tester /* MECANUM WHEEL ROBOT - BLUETOOTH CONTROLLED v1.0 - Allows you to control a mecanum robot via bluetooth - Tested with Arduino Mega 2560 - Android application - https://play.google.com/store/apps/details?id=pl.mobilerobots.vacuumcleanerrobot&hl=pl - Project description - http://www.instructables.com/id/Mecanum-wheel-robot-bluetooth-controlled Author: Adam Srebro www: http://www.mobilerobots.pl/ Connections: Bluetooth (e.g HC-06)-> Arduino Mega 2560 TXD - TX1 (19) RXD - RX1 (18) VCC - 5V GND - GND TB6612FNG Dual Motor Driver -> Arduino Mega 2560 //PWM control RightFrontMotor_PWMA - 2 LeftFrontMotor_PWMB - 3 RightRearMotor_PWMA - 4 LeftRearMotor_PWMB - 5 //Control of rotation direction RightFrontMotor_AIN1 - 22 RightFrontMotor_AIN2 - 23 LeftFrontMotor_BIN1 - 24 LeftFrontMotor_BIN2 - 25 RightRearMotor_AIN1 - 26 RightRearMotor_AIN2 - 27 LeftRearMotor_BIN1 - 28 LeftRearMotor_BIN2 - 29 //The module and motors power supply STBY - Vcc VMOT - motor voltage (4.5 to 13.5 V) - 11.1V from LiPo battery Vcc - logic voltage (2.7 to 5.5) - 5V from Arduino GND - GND TB6612FNG Dual Motor Driver -> DC Motors MotorDriver1_AO1 - RightFrontMotor MotorDriver1_A02 - RightFrontMotor MotorDriver1_B01 - LeftFrontMotor MotorDriver1_B02 - LeftFrontMotor MotorDriver2_AO1 - RightRearMotor MotorDriver2_A02 - RightRearMotor MotorDriver2_B01 - LeftRearMotor MotorDriver2_B02 - LeftRearMotor */ #include <Wire.h> #include <math.h> /*TB6612FNG Dual Motor Driver Carrier*/ const int RightFrontMotor_PWM = 2; // pwm output const int LeftFrontMotor_PWM = 3; // pwm output const int RightRearMotor_PWM = 4; // pwm output const int LeftRearMotor_PWM = 5; // pwm output //Front motors const int RightFrontMotor_AIN1 = 22; // control Input AIN1 - right front motor const int RightFrontMotor_AIN2 = 23; // control Input AIN2 - right front motor const int LeftFrontMotor_BIN1 = 24; // control Input BIN1 - left front motor const int LeftFrontMotor_BIN2 = 25; // control Input BIN2 - left front motor //Rear motors const int RightRearMotor_AIN1 = 26; // control Input AIN1 - right rear motor const int RightRearMotor_AIN2 = 27; // control Input AIN2 - right rear motor const int LeftRearMotor_BIN1 = 28; // control Input BIN1 - left rear motor const int LeftRearMotor_BIN2 = 29; // control Input BIN2 - left rear motor long pwmLvalue = 255; long pwmRvalue = 255; byte pwmChannel; const char startOfNumberDelimiter = '<'; const char endOfNumberDelimiter = '>'; void setup(){ Serial1.begin(9600);// HC-06 default baudrate: 9600 //Setup RightFrontMotor pinMode(RightFrontMotor_AIN1, OUTPUT); //Initiates Motor Channel A1 pin pinMode(RightFrontMotor_AIN2, OUTPUT); //Initiates Motor Channel A2 pin //Setup LeftFrontMotor pinMode(LeftFrontMotor_BIN1, OUTPUT); //Initiates Motor Channel B1 pin pinMode(LeftFrontMotor_BIN2, OUTPUT); //Initiates Motor Channel B2 pin //Setup RightFrontMotor pinMode(RightRearMotor_AIN1, OUTPUT); //Initiates Motor Channel A1 pin pinMode(RightRearMotor_AIN2, OUTPUT); //Initiates Motor Channel A2 pin //Setup LeftFrontMotor pinMode(LeftRearMotor_BIN1, OUTPUT); //Initiates Motor Channel B1 pin pinMode(LeftRearMotor_BIN2, OUTPUT); //Initiates Motor Channel B2 pin Wire.begin(); }// void setup() void loop(){ if (Serial1.available()) { processInput(); } }// void loop() void motorControl(String motorStr,int mdirection, int mspeed){ int IN1; int IN2; int motorPWM; if (motorStr == "rf") { //right front IN1 = RightFrontMotor_AIN1; IN2 = RightFrontMotor_AIN2; motorPWM = RightFrontMotor_PWM; } else if (motorStr == "lf") { //left front IN1 = LeftFrontMotor_BIN1; IN2 = LeftFrontMotor_BIN2; motorPWM = LeftFrontMotor_PWM; } else if (motorStr == "rr") { IN1 = RightRearMotor_AIN1; IN2 = RightRearMotor_AIN2; motorPWM = RightRearMotor_PWM; } else if (motorStr == "lr") { IN1 = LeftRearMotor_BIN1; IN2 = LeftRearMotor_BIN2; motorPWM = LeftRearMotor_PWM; } if (mdirection == 1){ digitalWrite(IN1, LOW); digitalWrite(IN2, HIGH); } else if (mdirection == -1){ digitalWrite(IN1, HIGH); digitalWrite(IN2, LOW); } analogWrite(motorPWM, mspeed); } void processInput (){ static long receivedNumber = 0; static boolean negative = false; byte c = Serial1.read (); switch (c){ case endOfNumberDelimiter: if (negative) SetPWM(- receivedNumber, pwmChannel); else SetPWM(receivedNumber, pwmChannel); // fall through to start a new number case startOfNumberDelimiter: receivedNumber = 0; negative = false; pwmChannel = 0; break; case 'f': // Go FORWARD goForward(255); //Serial.println("forward"); break; case 'b': // Go BACK goBackwad(255); //Serial.println("backward"); break; case 'r': moveRight(255); break; case 'l': moveLeft(255); break; case 'i': turnRight(255); break; case 'j': turnLeft(255); break; case 'c': // Top Right moveRightForward(255); break; case 'd': // Top Left moveLeftForward(255); break; case 'e': // Bottom Right moveRightBackward(255); break; case 'h': // Bottom Left moveLeftBackward(255); break; case 's': hardStop(); break; case 'x': pwmChannel = 1; // RightFrontMotor_PWM break; case 'y': // LeftFrontMotor_PWM pwmChannel = 2; break; case '0' ... '9': receivedNumber *= 10; receivedNumber += c - '0'; break; case '-': negative = true; break; } // end of switch } // void processInput () void goForward(int mspeed){ motorControl("rf", 1, mspeed); motorControl("lf", 1, mspeed); motorControl("rr", 1, mspeed); motorControl("lr", 1, mspeed); }// void goForward(int mspeed) void goBackwad(int mspeed){ motorControl("rf", -1, mspeed); motorControl("lf", -1, mspeed); motorControl("rr", -1, mspeed); motorControl("lr", -1, mspeed); }// void goBackwad(int mspeed) void moveRight(int mspeed){ motorControl("rf", -1, mspeed); motorControl("lf", 1, mspeed); motorControl("rr", 1, mspeed); motorControl("lr", -1, mspeed); }// void moveRight(int mspeed) void moveLeft(int mspeed){ motorControl("rf", 1, mspeed); motorControl("lf", -1, mspeed); motorControl("rr", -1, mspeed); motorControl("lr", 1, mspeed); }// void moveLeft(int mspeed) void moveRightForward(int mspeed){ motorControl("rf", 1, 0); motorControl("lf", 1, mspeed); motorControl("rr", 1, mspeed); motorControl("lr", 1, 0); }// void moveRightForward(int mspeed) void moveRightBackward(int mspeed){ motorControl("rf", -1, mspeed); motorControl("lf", 1, 0); motorControl("rr", 1, 0); motorControl("lr", -1, mspeed); }// void moveRightBackward(int mspeed) void moveLeftForward(int mspeed){ motorControl("rf", 1, mspeed); motorControl("lf", 1, 0); motorControl("rr", 1, 0); motorControl("lr", 1, mspeed); }// void moveLeftForward(int mspeed) void moveLeftBackward(int mspeed){ motorControl("rf", 1, 0); motorControl("lf", -1, mspeed); motorControl("rr", -1, mspeed); motorControl("lr", 1, 0); }// void moveLeftBackward(int mspeed) void turnRight(int mspeed){ motorControl("rf", -1, mspeed); motorControl("lf", 1, mspeed); motorControl("rr", -1, mspeed); motorControl("lr", 1, mspeed); }// void turnRight(int mspeed) void turnLeft(int mspeed){ motorControl("rf", 1, mspeed); motorControl("lf", -1, mspeed); motorControl("rr", 1, mspeed); motorControl("lr", -1, mspeed); }// void turnRight(int mspeed) void stopRobot(int delay_ms){ analogWrite(RightFrontMotor_PWM, 0); analogWrite(LeftFrontMotor_PWM, 0); analogWrite(RightRearMotor_PWM, 0); analogWrite(LeftRearMotor_PWM, 0); delay(delay_ms); }// void stopRobot(int delay_ms) void hardStop(){ analogWrite(RightFrontMotor_PWM, 0); analogWrite(LeftFrontMotor_PWM, 0); analogWrite(RightRearMotor_PWM, 0); analogWrite(LeftRearMotor_PWM, 0); }// void stopRobot() void SetPWM (const long pwm_num, byte pwm_channel){ if(pwm_channel==1){ // DRIVE MOTOR analogWrite(RightFrontMotor_PWM, pwm_num); pwmRvalue = pwm_num; } else if(pwm_channel==2){ // STEERING MOTOR analogWrite(LeftFrontMotor_PWM, pwm_num); pwmLvalue = pwm_num; } }// void SetPWM (const long pwm_num, byte pwm_channel)
Autres exemples robot arduino avec roues mecanum
Robot-Arduino_Mecanum_001.ino
- Robot-Arduino_Mecanum_001.ino
//A tester /* ___ ___ ___ _ _ ___ ___ ____ ___ ____ * / _ \ /___)/ _ \| | | |/ _ \ / _ \ / ___) _ \| \ *| |_| |___ | |_| | |_| | |_| | |_| ( (__| |_| | | | | * \___/(___/ \___/ \__ |\___/ \___(_)____)___/|_|_|_| * (____/ * Arduino Mecanum Omni Direction Wheel Robot Car * Tutorial URL https://osoyoo.com/?p=43404 * CopyRight www.osoyoo.com * After running the code, smart car will * go forward and go backward for 2 seconds, * left turn and right turn for 2 seconds, * right shift and left shift for 2 seconds, * left diagonal back and right diagonal forward for 2 seconds, * left diagonal forward and right diagonal back for 2 seconds, * then stop. * */ #define SPEED 100 #define TURN_SPEED 100 #define speedPinR 9 // Front Wheel PWM pin connect Model-Y M_B ENA #define RightMotorDirPin1 22 //Front Right Motor direction pin 1 to Model-Y M_B IN1 (K1) #define RightMotorDirPin2 24 //Front Right Motor direction pin 2 to Model-Y M_B IN2 (K1) #define LeftMotorDirPin1 26 //Front Left Motor direction pin 1 to Model-Y M_B IN3 (K3) #define LeftMotorDirPin2 28 //Front Left Motor direction pin 2 to Model-Y M_B IN4 (K3) #define speedPinL 10 // Front Wheel PWM pin connect Model-Y M_B ENB #define speedPinRB 11 // Rear Wheel PWM pin connect Left Model-Y M_A ENA #define RightMotorDirPin1B 5 //Rear Right Motor direction pin 1 to Model-Y M_A IN1 ( K1) #define RightMotorDirPin2B 6 //Rear Right Motor direction pin 2 to Model-Y M_A IN2 ( K1) #define LeftMotorDirPin1B 7 //Rear Left Motor direction pin 1 to Model-Y M_A IN3 (K3) #define LeftMotorDirPin2B 8 //Rear Left Motor direction pin 2 to Model-Y M_A IN4 (K3) #define speedPinLB 12 // Rear Wheel PWM pin connect Model-Y M_A ENB /*motor control*/ void go_advance(int speed){ RL_fwd(speed); RR_fwd(speed); FR_fwd(speed); FL_fwd(speed); } void go_back(int speed){ RL_bck(speed); RR_bck(speed); FR_bck(speed); FL_bck(speed); } void right_shift(int speed_fl_fwd,int speed_rl_bck ,int speed_rr_fwd,int speed_fr_bck) { FL_fwd(speed_fl_fwd); RL_bck(speed_rl_bck); RR_fwd(speed_rr_fwd); FR_bck(speed_fr_bck); } void left_shift(int speed_fl_bck,int speed_rl_fwd ,int speed_rr_bck,int speed_fr_fwd){ FL_bck(speed_fl_bck); RL_fwd(speed_rl_fwd); RR_bck(speed_rr_bck); FR_fwd(speed_fr_fwd); } void left_turn(int speed){ RL_bck(0); RR_fwd(speed); FR_fwd(speed); FL_bck(0); } void right_turn(int speed){ // RL_fwd(speed); // RR_bck(0); // FR_bck(0); // FL_fwd(speed); RL_fwd(speed); RR_fwd(0); FR_fwd(0); FL_fwd(speed); } void left_back(int speed){ RL_fwd(0); RR_bck(speed); FR_bck(speed); FL_fwd(0); } void right_back(int speed){ RL_bck(speed); RR_fwd(0); FR_fwd(0); FL_bck(speed); } void clockwise(int speed){ RL_fwd(speed); RR_bck(speed); FR_bck(speed); FL_fwd(speed); } void countclockwise(int speed){ RL_bck(speed); RR_fwd(speed); FR_fwd(speed); FL_bck(speed); } void FR_fwd(int speed) //front-right wheel forward turn { digitalWrite(RightMotorDirPin1,HIGH); digitalWrite(RightMotorDirPin2,LOW); analogWrite(speedPinR,speed); } void FR_bck(int speed) // front-right wheel backward turn { digitalWrite(RightMotorDirPin1,LOW); digitalWrite(RightMotorDirPin2,HIGH); analogWrite(speedPinR,speed); } void FL_fwd(int speed) // front-left wheel forward turn { digitalWrite(LeftMotorDirPin1,HIGH); digitalWrite(LeftMotorDirPin2,LOW); analogWrite(speedPinL,speed); } void FL_bck(int speed) // front-left wheel backward turn { digitalWrite(LeftMotorDirPin1,LOW); digitalWrite(LeftMotorDirPin2,HIGH); analogWrite(speedPinL,speed); } void RR_fwd(int speed) //rear-right wheel forward turn { digitalWrite(RightMotorDirPin1B, HIGH); digitalWrite(RightMotorDirPin2B,LOW); analogWrite(speedPinRB,speed); } void RR_bck(int speed) //rear-right wheel backward turn { digitalWrite(RightMotorDirPin1B, LOW); digitalWrite(RightMotorDirPin2B,HIGH); analogWrite(speedPinRB,speed); } void RL_fwd(int speed) //rear-left wheel forward turn { digitalWrite(LeftMotorDirPin1B,HIGH); digitalWrite(LeftMotorDirPin2B,LOW); analogWrite(speedPinLB,speed); } void RL_bck(int speed) //rear-left wheel backward turn { digitalWrite(LeftMotorDirPin1B,LOW); digitalWrite(LeftMotorDirPin2B,HIGH); analogWrite(speedPinLB,speed); } void stop_Stop() //Stop { analogWrite(speedPinLB,0); analogWrite(speedPinRB,0); analogWrite(speedPinL,0); analogWrite(speedPinR,0); } //Pins initialize void init_GPIO() { pinMode(RightMotorDirPin1, OUTPUT); pinMode(RightMotorDirPin2, OUTPUT); pinMode(speedPinL, OUTPUT); pinMode(LeftMotorDirPin1, OUTPUT); pinMode(LeftMotorDirPin2, OUTPUT); pinMode(speedPinR, OUTPUT); pinMode(RightMotorDirPin1B, OUTPUT); pinMode(RightMotorDirPin2B, OUTPUT); pinMode(speedPinLB, OUTPUT); pinMode(LeftMotorDirPin1B, OUTPUT); pinMode(LeftMotorDirPin2B, OUTPUT); pinMode(speedPinRB, OUTPUT); stop_Stop(); } void setup() { init_GPIO(); go_advance(SPEED); delay(1000); stop_Stop(); delay(1000); go_back(SPEED); delay(1000); stop_Stop(); delay(1000); left_turn(TURN_SPEED); delay(1000); stop_Stop(); delay(1000); right_turn(TURN_SPEED); delay(1000); stop_Stop(); delay(1000); right_shift(200,200,200,200); //right shift delay(1000); stop_Stop(); delay(1000); left_shift(200,200,200,200); //left shift delay(1000); stop_Stop(); delay(1000); left_shift(200,0,200,0); //left diagonal back delay(1000); stop_Stop(); delay(1000); right_shift(200,0,200,0); //right diagonal ahead delay(1000); stop_Stop(); delay(1000); left_shift(0,200,0,200); //left diagonal ahead delay(1000); stop_Stop(); delay(1000); right_shift(0,200,0,200); //right diagonal back delay(1000); stop_Stop(); delay(1000); } void loop(){ }
Robot-Arduino_Mecanum_002.ino
- Robot-Arduino_Mecanum_001.ino
/* ___ ___ ___ _ _ ___ ___ ____ ___ ____ * / _ \ /___)/ _ \| | | |/ _ \ / _ \ / ___) _ \| \ *| |_| |___ | |_| | |_| | |_| | |_| ( (__| |_| | | | | * \___/(___/ \___/ \__ |\___/ \___(_)____)___/|_|_|_| * (____/ * Omni direction Mecanum Wheel Arduino Smart Car Tutorial Lesson 2 Obstacle avoidance auto driving. * Tutorial URL https://osoyoo.com/?p=43404 * CopyRight www.osoyoo.com * This project will show you how to make osoyoo robot car in auto drive mode and avoid obstacles * * */ #include <Servo.h> #define speedPinR 9 // Front Wheel PWM pin connect Model-Y M_B ENA #define RightMotorDirPin1 22 //Front Right Motor direction pin 1 to Model-Y M_B IN1 (K1) #define RightMotorDirPin2 24 //Front Right Motor direction pin 2 to Model-Y M_B IN2 (K1) #define LeftMotorDirPin1 26 //Front Left Motor direction pin 1 to Model-Y M_B IN3 (K3) #define LeftMotorDirPin2 28 //Front Left Motor direction pin 2 to Model-Y M_B IN4 (K3) #define speedPinL 10 // Front Wheel PWM pin connect Model-Y M_B ENB #define speedPinRB 11 // Rear Wheel PWM pin connect Left Model-Y M_A ENA #define RightMotorDirPin1B 5 //Rear Right Motor direction pin 1 to Model-Y M_A IN1 ( K1) #define RightMotorDirPin2B 6 //Rear Right Motor direction pin 2 to Model-Y M_A IN2 ( K1) #define LeftMotorDirPin1B 7 //Rear Left Motor direction pin 1 to Model-Y M_A IN3 (K3) #define LeftMotorDirPin2B 8 //Rear Left Motor direction pin 2 to Model-Y M_A IN4 (K3) #define speedPinLB 12 // Rear Wheel PWM pin connect Model-Y M_A ENB #define LPT 2 // scan loop coumter #define SERVO_PIN 13 //servo connect to D5 #define Echo_PIN 31 // Ultrasonic Echo pin connect to A5 #define Trig_PIN 30 // Ultrasonic Trig pin connect to A4 #define FAST_SPEED 160 //both sides of the motor speed #define SPEED 120 //both sides of the motor speed #define TURN_SPEED 120 //both sides of the motor speed #define BACK_SPEED1 160 //back speed #define BACK_SPEED2 90 //back speed int leftscanval, centerscanval, rightscanval, ldiagonalscanval, rdiagonalscanval; const int distancelimit = 30; //distance limit for obstacles in front const int sidedistancelimit = 30; //minimum distance in cm to obstacles at both sides (the car will allow a shorter distance sideways) int distance; int numcycles = 0; const int turntime = 250; //Time the robot spends turning (miliseconds) const int backtime = 300; //Time the robot spends turning (miliseconds) int thereis; Servo head; /*motor control*/ void go_Advance() //Forward { FR_fwd(); FL_fwd(); RR_fwd(); RL_fwd(); } void go_Left() //Turn left { FR_fwd(); FL_bck(); RR_fwd(); RL_bck(); } void go_Right() //Turn right { FR_bck(); FL_fwd(); RR_bck(); RL_fwd(); } void go_Back() //Reverse { FR_bck(); FL_bck(); RR_bck(); RL_bck(); } void stop_Stop() //Stop { digitalWrite(RightMotorDirPin1, LOW); digitalWrite(RightMotorDirPin2,LOW); digitalWrite(LeftMotorDirPin1,LOW); digitalWrite(LeftMotorDirPin2,LOW); digitalWrite(RightMotorDirPin1B, LOW); digitalWrite(RightMotorDirPin2B,LOW); digitalWrite(LeftMotorDirPin1B,LOW); digitalWrite(LeftMotorDirPin2B,LOW); set_Motorspeed(0,0,0,0); } /*set motor speed */ void set_Motorspeed(int leftFront,int rightFront,int leftBack,int rightBack) { analogWrite(speedPinL,leftFront); analogWrite(speedPinR,rightFront); analogWrite(speedPinLB,leftBack); analogWrite(speedPinRB,rightBack); } void FR_fwd() //front-right wheel forward turn { digitalWrite(RightMotorDirPin1,HIGH); digitalWrite(RightMotorDirPin2,LOW); } void FR_bck() // front-right wheel backward turn { digitalWrite(RightMotorDirPin1,LOW); digitalWrite(RightMotorDirPin2,HIGH); } void FL_fwd() // front-left wheel forward turn { digitalWrite(LeftMotorDirPin1,HIGH); digitalWrite(LeftMotorDirPin2,LOW); } void FL_bck() // front-left wheel backward turn { digitalWrite(LeftMotorDirPin1,LOW); digitalWrite(LeftMotorDirPin2,HIGH); } void RR_fwd() //rear-right wheel forward turn { digitalWrite(RightMotorDirPin1B,HIGH); digitalWrite(RightMotorDirPin2B,LOW); } void RR_bck() //rear-right wheel backward turn { digitalWrite(RightMotorDirPin1B,LOW); digitalWrite(RightMotorDirPin2B,HIGH); } void RL_fwd() //rear-left wheel forward turn { digitalWrite(LeftMotorDirPin1B,HIGH); digitalWrite(LeftMotorDirPin2B,LOW); } void RL_bck() //rear-left wheel backward turn { digitalWrite(LeftMotorDirPin1B,LOW); digitalWrite(LeftMotorDirPin2B,HIGH); } /*detection of ultrasonic distance*/ int watch(){ long echo_distance; digitalWrite(Trig_PIN,LOW); delayMicroseconds(5); digitalWrite(Trig_PIN,HIGH); delayMicroseconds(15); digitalWrite(Trig_PIN,LOW); echo_distance=pulseIn(Echo_PIN,HIGH); echo_distance=echo_distance*0.01657; //how far away is the object in cm //Serial.println((int)echo_distance); return round(echo_distance); } //Meassures distances to the right, left, front, left diagonal, right diagonal and asign them in cm to the variables rightscanval, //leftscanval, centerscanval, ldiagonalscanval and rdiagonalscanval (there are 5 points for distance testing) String watchsurrounding(){ /* obstacle_status is a binary integer, its last 5 digits stands for if there is any obstacles in 5 directions, * for example B101000 last 5 digits is 01000, which stands for Left front has obstacle, B100111 means front, right front and right ha */ int obstacle_status =B100000; centerscanval = watch(); if(centerscanval<distancelimit){ stop_Stop(); obstacle_status =obstacle_status | B100; } head.write(120); delay(100); ldiagonalscanval = watch(); if(ldiagonalscanval<distancelimit){ stop_Stop(); obstacle_status =obstacle_status | B1000; } head.write(170); //Didn't use 180 degrees because my servo is not able to take this angle delay(300); leftscanval = watch(); if(leftscanval<sidedistancelimit){ stop_Stop(); obstacle_status =obstacle_status | B10000; } head.write(90); //use 90 degrees if you are moving your servo through the whole 180 degrees delay(100); centerscanval = watch(); if(centerscanval<distancelimit){ stop_Stop(); obstacle_status =obstacle_status | B100; } head.write(40); delay(100); rdiagonalscanval = watch(); if(rdiagonalscanval<distancelimit){ stop_Stop(); obstacle_status =obstacle_status | B10; } head.write(0); delay(100); rightscanval = watch(); if(rightscanval<sidedistancelimit){ stop_Stop(); obstacle_status =obstacle_status | 1; } head.write(90); //Finish looking around (look forward again) delay(300); String obstacle_str= String(obstacle_status,BIN); obstacle_str= obstacle_str.substring(1,6); return obstacle_str; //return 5-character string standing for 5 direction obstacle status } void auto_avoidance(){ ++numcycles; if(numcycles>=LPT){ //Watch if something is around every LPT loops while moving forward stop_Stop(); String obstacle_sign=watchsurrounding(); // 5 digits of obstacle_sign binary value means the 5 direction obstacle status Serial.print("begin str="); Serial.println(obstacle_sign); if( obstacle_sign=="10000"){ Serial.println("SLIT right"); set_Motorspeed(FAST_SPEED,SPEED,FAST_SPEED,SPEED); go_Advance(); delay(turntime); stop_Stop(); } else if( obstacle_sign=="00001" ){ Serial.println("SLIT LEFT"); set_Motorspeed(SPEED,FAST_SPEED,SPEED,FAST_SPEED); go_Advance(); delay(turntime); stop_Stop(); } else if( obstacle_sign=="11100" || obstacle_sign=="01000" || obstacle_sign=="11000" || obstacle_sign=="10100" || obstacle_sign=="01100" ||obstacle_sign=="00100" ||obstacle_sign=="01000" ){ Serial.println("hand right"); go_Right(); set_Motorspeed(TURN_SPEED,TURN_SPEED,TURN_SPEED,TURN_SPEED); delay(turntime); stop_Stop(); } else if( obstacle_sign=="00010" || obstacle_sign=="00111" || obstacle_sign=="00011" || obstacle_sign=="00101" || obstacle_sign=="00110" || obstacle_sign=="01010" ){ Serial.println("hand left"); go_Left();//Turn left set_Motorspeed(TURN_SPEED,TURN_SPEED,TURN_SPEED,TURN_SPEED); delay(turntime); stop_Stop(); } else if( obstacle_sign=="01111" || obstacle_sign=="10111" || obstacle_sign=="11111" ){ Serial.println("hand back left"); go_Back(); set_Motorspeed( BACK_SPEED1,BACK_SPEED2,BACK_SPEED1,BACK_SPEED2); delay(backtime); stop_Stop(); } else if( obstacle_sign=="11011" || obstacle_sign=="11101" || obstacle_sign=="11110" || obstacle_sign=="01110" ){ Serial.println("hand back right"); go_Back(); set_Motorspeed(BACK_SPEED2,BACK_SPEED1,BACK_SPEED2,BACK_SPEED1); delay(backtime); stop_Stop(); } else Serial.println("no handle"); numcycles=0; //Restart count of cycles } else { set_Motorspeed(SPEED,SPEED,SPEED,SPEED); go_Advance(); // if nothing is wrong go forward using go() function above. delay(backtime); stop_Stop(); } //else Serial.println(numcycles); distance = watch(); // use the watch() function to see if anything is ahead (when the robot is just moving forward and not looking around it will test the distance in front) if (distance<distancelimit){ // The robot will just stop if it is completely sure there's an obstacle ahead (must test 25 times) (needed to ignore ultrasonic sensor's false signals) Serial.println("final go back"); go_Back(); set_Motorspeed(BACK_SPEED1,BACK_SPEED2,BACK_SPEED1,BACK_SPEED2); delay(backtime); ++thereis;} if (distance>distancelimit){ thereis=0;} //Count is restarted if (thereis > 25){ Serial.println("final stop"); stop_Stop(); // Since something is ahead, stop moving. thereis=0; } } void setup() { /*setup L298N pin mode*/ pinMode(RightMotorDirPin1, OUTPUT); pinMode(RightMotorDirPin2, OUTPUT); pinMode(speedPinL, OUTPUT); pinMode(LeftMotorDirPin1, OUTPUT); pinMode(LeftMotorDirPin2, OUTPUT); pinMode(speedPinR, OUTPUT); pinMode(RightMotorDirPin1B, OUTPUT); pinMode(RightMotorDirPin2B, OUTPUT); pinMode(speedPinLB, OUTPUT); pinMode(LeftMotorDirPin1B, OUTPUT); pinMode(LeftMotorDirPin2B, OUTPUT); pinMode(speedPinRB, OUTPUT); stop_Stop();//stop move /*init HC-SR04*/ pinMode(Trig_PIN, OUTPUT); pinMode(Echo_PIN,INPUT); /*init buzzer*/ digitalWrite(Trig_PIN,LOW); /*init servo*/ head.attach(SERVO_PIN); head.write(0); delay(1000); head.write(170); delay(1000); head.write(90); delay(8000); Serial.begin(9600); stop_Stop();//Stop } void loop() { auto_avoidance(); // Serial.println( watchsurrounding()); }
Achat robot Mecanum
Liens Projets Arduino Robot Mecanum
Programme Robot Mecanum
Robot Mecanum 001
- robot_Original_Mecanum.ino
// Tester par GL; Fonctionne mais ne permet pas tout les Mouvements //2020.11.22 //Configure THE PWM control pin const int PWM2A = 11; //M1 motor const int PWM2B = 3; //M2 motor const int PWM0A = 6; //M3 motor const int PWM0B = 5; //M4 motor const int DIR_CLK = 4; // Data input clock line const int DIR_EN = 7; //Equip the L293D enabling pins const int DATA = 8; // USB cable const int DIR_LATCH = 12; // Output memory latch clock //Define the pin of ultrasonic obstacle avoidance sensor const int Trig = A2; //A2 is defined as the pin Trig connected to the ultrasonic sensor const int Echo = A3; //A3 is defined as the pin Echo connected to the ultrasonic sensor //Define motion state const int Forward = 39; //39存放到Forward const int Back = 216; //216存放到Back const int Left = 57; //57存放到Left变量中 const int Right = 198; //The right amount of change const int Stop = 0; //Parking variable //Set the default speed between 1 and 255 int Speed1 = 180; //PWM0B -M3 int Speed2 = 180; //PWM0A -M4 int Speed3 = 180; //PWM2A -M3 int Speed4 = 180; //PWM2B -M4 int distance = 0; //Variables for storing ultrasonic sensor measurements char serialData; //把串口接收的数据存放serialData中 char cmd; //Store bluetooth receive commands void setup() { Serial.begin(9600);//Set the serial port baud rate 9600 //Configure as output mode pinMode(DIR_CLK,OUTPUT); pinMode(DATA,OUTPUT); pinMode(DIR_EN,OUTPUT); pinMode(DIR_LATCH,OUTPUT); pinMode(PWM0B,OUTPUT); pinMode(PWM0A,OUTPUT); pinMode(PWM2A,OUTPUT); pinMode(PWM2B,OUTPUT); pinMode(Trig,OUTPUT);//The Trig pin connected to the ultrasound is set to output mode pinMode(Echo,INPUT);//The Echo pin connected to the ultrasound is set to input mode void Motor(int Dri,int Speed1,int Speed2,int Speed3,int Speed4); int SR04(int Trig,int Echo); void AvoidingObstacles(); void HC05(); } void loop() { distance = SR04(Trig,Echo); //Acquisition of ultrasonic distance HC05(); //Call the Bluetooth car control function } /* Function name: Motor(); * Function: Change the movement direction and speed of the car through the entrance parameters * Entry parameter 1: Dri car movement direction * Entry parameters 2~3: Speed1~Speed4 motor speed, value range 0~255 * Dri value description (forward :39; Back: 216; Left translation: 57; Right translation: 198; Stop: 0; * Right rotation: 106; Left rotation: 149) * Return value: None */ void Motor(int Dir,int Speed1,int Speed2,int Speed3,int Speed4) { analogWrite(PWM2A,Speed1); //Motor PWM speed regulation analogWrite(PWM2B,Speed2); //Motor PWM speed regulation analogWrite(PWM0A,Speed3); //Motor PWM speed regulation analogWrite(PWM0B,Speed4); //Motor PWM speed regulation digitalWrite(DIR_LATCH,LOW); //DIR_LATCH sets the low level and writes the direction of motion in preparation shiftOut(DATA,DIR_CLK,MSBFIRST,Dir);//Write Dir motion direction value digitalWrite(DIR_LATCH,HIGH);//DIR_LATCH sets the high level and outputs the direction of motion } /* Function name: SR04() Function: Obtain ultrasonic ranging data Entry parameters: Trig, Echo Function return value: cm */ int SR04(int Trig,int Echo) { float cm = 0; digitalWrite(Trig,LOW); //Trig is set to low level delayMicroseconds(2); //Wait 2 microseconds digitalWrite(Trig,HIGH); //Trig is set to high level delayMicroseconds(15); //Wait 15 microseconds digitalWrite(Trig,LOW); //Trig is set to low cm = pulseIn(Echo,HIGH)/58.8; //Convert the ranging time to CM cm = (int(cm * 100.0))/100.0; //Leave 2 as a decimal Serial.print("Distance:"); //Character Distance displayed in serial port monitor window: Serial.print(cm); Serial.println("cm"); return cm; //Returns cm value ranging data } /* * Function name: HC05() * Function: Receive Bluetooth data, control the car movement direction * Entry parameters: None * Return value: None */ void HC05() { if(Serial.available() > 0) //Determine if the received data is greater than 0 { serialData = Serial.read(); //Receiving function if ('F' == serialData ) cmd = 'F'; //If the data received by the serial port is character F, save F to CMD else if('B' == serialData ) cmd = 'B'; //If the data received by the serial port is character B, save F to CMD else if('L' == serialData ) cmd = 'L'; //If the serial port receives data as the character L, save F to CMD else if('R' == serialData ) cmd = 'R'; //If the serial port receives data as the character R, save F to CMD else if('S' == serialData ) cmd = 'S'; //If the serial port receives data as character S, save F to CMD else if( serialData == '+' && Speed1 < 245)//If you receive a string plus, the speed increases { Speed1 += 10; //We're going to increase the velocity by 10 at a time Speed2 = Speed1; Speed3 = Speed1; Speed4 = Speed1; } else if( serialData == '-' && Speed1 > 30)//When I receive a string -- the speed decreases { Speed1 -= 10; //I'm going to subtract 10 at a time Speed2 = Speed1; Speed3 = Speed1; Speed4 = Speed1; } else if('A' == serialData) //Bluetooth received the string R, car right translation { Motor(106,Speed1,Speed2,Speed3,Speed4); // delay(100); } else if('C' == serialData) //Bluetooth received the string R, car right translation { Motor(149,Speed1,Speed2,Speed3,Speed4); // delay(100); } } if('F' == cmd) //If Bluetooth receives the string F, the dolly moves forward and enables obstacle avoidance { AvoidingObstacles();//The ultrasonic obstacle avoidance function is called to realize the obstacle avoidance function } else if('B' == cmd) //Bluetooth receives string B, car backs up { Motor(Back,Speed1,Speed2,Speed3,Speed4); } else if('L' == cmd) //Bluetooth received the string L, car left translation { Motor(Left,Speed1,Speed2,Speed3,Speed4); } else if('R' == cmd) //Bluetooth received the string R, car right translation { Motor(Right,Speed1,Speed2,Speed3,Speed4); //right translation } else if('S' == serialData) //When the string S is received, the cart stops moving { Motor(Stop,0,0,0,0); } } void AvoidingObstacles() { if((distance > 20 ) || cmd == 'F')//If the distance is greater than 20cm or bluetooth receives a command equal to F { delay(100);//Delay of 100 ms if(distance > 20)//Again, determine if the distance is really greater than 20cm { Motor(Forward,Speed1,Speed2,Speed3,Speed4); //Call forward function } else //Otherwise the distance is less than 20 { Motor(Back,Speed1,Speed2,Speed3,Speed4);//retreat delay(500); Motor(106,Speed1,Speed2,Speed3,Speed4);//Turn left to change the direction of the car delay(500); } } }
Robot Mecanum Version 3 modifié par GL
- Robot_Mecanum003.ino
// Tester par GL le 19 Aout 2022 //Avec compensation vitesse moteur gauche ( M1 et M2 ) #include <MotorDriver.h> //Define the pin of ultrasonic obstacle avoidance sensor const int Trig = A2; //A2 is defined as the pin Trig connected to the ultrasonic sensor const int Echo = A3; //A3 is defined as the pin Echo connected to the ultrasonic sensor MotorDriver m; int vit=180; int comp = vit /3; // Compensation vitesse pour les moteurs M1 et M2 int vitcomp= (vit - comp); ; int tempo = 1000; int tempo10 = 1000; int dure= 2; int distance = 0; //Variables for storing ultrasonic sensor measurements char serialData; char cmd; void arret() { m.motor(1,RELEASE,0); m.motor(2,RELEASE,0); m.motor(3,RELEASE,0); m.motor(4,RELEASE,0); } void avant() { m.motor(1,FORWARD,vitcomp); m.motor(2,FORWARD,vitcomp); m.motor(3,FORWARD,vit); m.motor(4,FORWARD,vit); } void arriere() { m.motor(1,BACKWARD,vitcomp); m.motor(2,BACKWARD,vitcomp); m.motor(3,BACKWARD,vit); m.motor(4,BACKWARD,vit); } void LatDroite() { m.motor(1,FORWARD,vitcomp); m.motor(2,BACKWARD,vitcomp); m.motor(3,FORWARD,vit); m.motor(4,BACKWARD,vit); } void LatGauche() { m.motor(1,BACKWARD,vitcomp); m.motor(2,FORWARD,vitcomp); m.motor(3,BACKWARD,vit); m.motor(4,FORWARD,vit); } void BiaisDroite() { m.motor(1,FORWARD,vitcomp); m.motor(2,RELEASE,0); m.motor(3,FORWARD,vit); m.motor(4,RELEASE,0); } void BiaisGauche() { m.motor(1,RELEASE,0); m.motor(2,FORWARD,vitcomp); m.motor(3,RELEASE,0); m.motor(4,FORWARD,vit); } void TourneDroite() { m.motor(1,FORWARD,vitcomp); m.motor(2,FORWARD,vitcomp); m.motor(3,RELEASE,0); m.motor(4,RELEASE,0); } void TourneGauche() { m.motor(1,RELEASE,0); m.motor(2,RELEASE,0); m.motor(3,FORWARD,vit); m.motor(4,FORWARD,vit); } void DemiTourDroite() { m.motor(1,FORWARD,vitcomp); m.motor(2,FORWARD,vitcomp); m.motor(3,BACKWARD,vit); m.motor(4,BACKWARD,vit); } void DemiTourGauche() { m.motor(1,BACKWARD,vitcomp); m.motor(2,BACKWARD,vitcomp); m.motor(3,FORWARD,vit); m.motor(4,FORWARD,vit); } int SR04(int Trig,int Echo) { float cm = 0; digitalWrite(Trig,LOW); //Trig is set to low level delayMicroseconds(2); //Wait 2 microseconds digitalWrite(Trig,HIGH); //Trig is set to high level delayMicroseconds(15); //Wait 15 microseconds digitalWrite(Trig,LOW); //Trig is set to low cm = pulseIn(Echo,HIGH)/58.8; //Convert the ranging time to CM cm = (int(cm * 100.0))/100.0; //Leave 2 as a decimal //Serial.print("Distance:"); //Character Distance displayed in serial port monitor window: //Serial.print(cm); //Serial.println("cm"); return cm; //Returns cm value ranging data } void AvoidingObstacles() { if((distance > 20 ) || cmd == 'F')//If the distance is greater than 20cm or bluetooth receives a command equal to F { delay(100);//Delay of 100 ms if(distance > 20)//Again, determine if the distance is really greater than 20cm { avant(); } else //Otherwise the distance is less than 20 { arriere(); delay(500); TourneGauche(); delay(500); } } } void HC05() { if(Serial.available() == -1) { arret(); cmd='S'; } if(Serial.available() > 0) //Determine if the received data is greater than 0 { serialData = Serial.read(); //Receiving function if ('F' == serialData ) cmd = 'F'; //Avant else if('B' == serialData ) cmd = 'B'; //Arriere else if('L' == serialData ) cmd = 'L'; //Tourne Gauche else if('R' == serialData ) cmd = 'R'; //Tourne Droite else if('S' == serialData ) cmd = 'S'; //Stop else if('A' == serialData ) cmd = 'A'; //Lateral Droite else if('C' == serialData ) cmd = 'C'; //Lateral Gauche else if('D' == serialData ) cmd = 'D'; //Demi Tour else if('J' == serialData ) cmd = 'J'; //Biais Droite else if('K' == serialData ) cmd = 'K'; //Biais Gauche else if( serialData == '+' && vit < 245)//If you receive a string plus, the speed increases { comp += 5; //We're going to increase the velocity by 10 at a time } else if( serialData == '-' && vit > 30)//When I receive a string -- the speed decreases { comp -= 5; //I'm going to subtract 10 at a time } } if('F' == cmd) //If Bluetooth receives the string F, the dolly moves forward and enables obstacle avoidance { avant(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); //AvoidingObstacles();//The ultrasonic obstacle avoidance function is called to realize the obstacle avoidance function } else if('A' == serialData) { LatDroite(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } else if('J' == serialData) { BiaisDroite(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } else if('K' == serialData) { BiaisGauche(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } else if('C' == serialData) { LatGauche(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } else if('B' == cmd) //Bluetooth receives string B, car backs up { arriere(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } else if('L' == cmd) //Bluetooth received the string L, car left translation { TourneGauche(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } else if('R' == cmd) //Bluetooth received the string R, car right translation { TourneDroite(); //right translation delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } else if('S' == serialData) //When the string S is received, the cart stops moving { arret(); } else if('D' == serialData) { DemiTourDroite(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } } void setup() { Serial.begin(9600); pinMode(Trig,OUTPUT);//The Trig pin connected to the ultrasound is set to output mode pinMode(Echo,INPUT);//The Echo pin connected to the ultrasound is set to input mode void Motor(int Dri,int Speed1,int Speed2,int Speed3,int Speed4); int SR04(int Trig,int Echo); void AvoidingObstacles(); void HC05(); } void loop() { //distance = SR04(Trig,Echo); //Acquisition of ultrasonic distance HC05(); //Call the Bluetooth car control function }
Robot Mecanum Version 4 modifié par GL
- Robot_Mecanum004.ino
// Tester par GL le 22 Aout 2022 // Avec touche "G" symbole "O" pour le programme de demonstration //Avec compensation vitesse moteur gauche ( M1 et M2 ) /* ^ M1------|------M4 | | | | | M2------|------M3 */ #include <MotorDriver.h> //Define the pin of ultrasonic obstacle avoidance sensor const int Trig = A2; //A2 is defined as the pin Trig connected to the ultrasonic sensor const int Echo = A3; //A3 is defined as the pin Echo connected to the ultrasonic sensor MotorDriver m; int vit=180; int comp = vit /3; int vitcomp= (vit - comp); ; int tempo = 1000; int tempo10 = 1000; int dure= 2; int distance = 0; //Variables for storing ultrasonic sensor measurements char serialData; char cmd; void arret() { m.motor(1,RELEASE,0); m.motor(2,RELEASE,0); m.motor(3,RELEASE,0); m.motor(4,RELEASE,0); } void avant() { m.motor(1,FORWARD,vitcomp); m.motor(2,FORWARD,vitcomp); m.motor(3,FORWARD,vit); m.motor(4,FORWARD,vit); } void arriere() { m.motor(1,BACKWARD,vitcomp); m.motor(2,BACKWARD,vitcomp); m.motor(3,BACKWARD,vit); m.motor(4,BACKWARD,vit); } void LatDroite() { m.motor(1,FORWARD,vitcomp); m.motor(2,BACKWARD,vitcomp); m.motor(3,FORWARD,vit); m.motor(4,BACKWARD,vit); } void LatGauche() { m.motor(1,BACKWARD,vitcomp); m.motor(2,FORWARD,vitcomp); m.motor(3,BACKWARD,vit); m.motor(4,FORWARD,vit); } void BiaisDroite() { m.motor(1,FORWARD,vitcomp); m.motor(2,RELEASE,0); m.motor(3,FORWARD,vit); m.motor(4,RELEASE,0); } void BiaisGauche() { m.motor(1,RELEASE,0); m.motor(2,FORWARD,vitcomp); m.motor(3,RELEASE,0); m.motor(4,FORWARD,vit); } void TourneDroite() { m.motor(1,FORWARD,vitcomp); m.motor(2,FORWARD,vitcomp); m.motor(3,RELEASE,0); m.motor(4,RELEASE,0); } void TourneGauche() { m.motor(1,RELEASE,0); m.motor(2,RELEASE,0); m.motor(3,FORWARD,vit); m.motor(4,FORWARD,vit); } void DemiTourDroite() { m.motor(1,FORWARD,vitcomp); m.motor(2,FORWARD,vitcomp); m.motor(3,BACKWARD,vit); m.motor(4,BACKWARD,vit); } void DemiTourGauche() { m.motor(1,BACKWARD,vitcomp); m.motor(2,BACKWARD,vitcomp); m.motor(3,FORWARD,vit); m.motor(4,FORWARD,vit); } void Demo() { for (int i=0; i < 3 ; i++){ avant(); delay(tempo10); arriere(); delay(tempo10); LatDroite(); delay(tempo10); LatGauche(); delay(tempo10); BiaisDroite(); delay(tempo10); BiaisGauche(); delay(tempo10); TourneDroite(); delay(tempo10); TourneGauche(); delay(tempo10); DemiTourDroite(); delay(tempo10); DemiTourGauche(); delay(tempo10); } } int SR04(int Trig,int Echo) { float cm = 0; digitalWrite(Trig,LOW); //Trig is set to low level delayMicroseconds(2); //Wait 2 microseconds digitalWrite(Trig,HIGH); //Trig is set to high level delayMicroseconds(15); //Wait 15 microseconds digitalWrite(Trig,LOW); //Trig is set to low cm = pulseIn(Echo,HIGH)/58.8; //Convert the ranging time to CM cm = (int(cm * 100.0))/100.0; //Leave 2 as a decimal //Serial.print("Distance:"); //Character Distance displayed in serial port monitor window: //Serial.print(cm); //Serial.println("cm"); return cm; //Returns cm value ranging data } void AvoidingObstacles() { if((distance > 20 ) || cmd == 'F')//If the distance is greater than 20cm or bluetooth receives a command equal to F { delay(100);//Delay of 100 ms if(distance > 20)//Again, determine if the distance is really greater than 20cm { avant(); } else //Otherwise the distance is less than 20 { arriere(); delay(500); TourneGauche(); delay(500); } } } void HC05() { if(Serial.available() == -1) { arret(); cmd='S'; } if(Serial.available() > 0) //Determine if the received data is greater than 0 { serialData = Serial.read(); //Receiving function if ('F' == serialData ) cmd = 'F'; //Avant else if('B' == serialData ) cmd = 'B'; //Arriere else if('L' == serialData ) cmd = 'L'; //Tourne Gauche else if('R' == serialData ) cmd = 'R'; //Tourne Droite else if('S' == serialData ) cmd = 'S'; //Stop else if('A' == serialData ) cmd = 'A'; //Lateral Droite else if('C' == serialData ) cmd = 'C'; //Lateral Gauche else if('D' == serialData ) cmd = 'D'; //Demi Tour else if('J' == serialData ) cmd = 'J'; //Biais Droite else if('K' == serialData ) cmd = 'K'; //Biais Gauche else if('G' == serialData ) cmd = 'G'; //Demo else if( serialData == '+' && vit < 245)//If you receive a string plus, the speed increases { comp += 5; //We're going to increase the velocity by 10 at a time } else if( serialData == '-' && vit > 30)//When I receive a string -- the speed decreases { comp -= 5; //I'm going to subtract 10 at a time } } if('F' == cmd) //If Bluetooth receives the string F, the dolly moves forward and enables obstacle avoidance { avant(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); //AvoidingObstacles();//The ultrasonic obstacle avoidance function is called to realize the obstacle avoidance function } else if('A' == serialData) { LatDroite(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } else if('J' == serialData) { BiaisDroite(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } else if('K' == serialData) { BiaisGauche(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } else if('C' == serialData) { LatGauche(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } else if('B' == cmd) //Bluetooth receives string B, car backs up { arriere(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } else if('L' == cmd) //Bluetooth received the string L, car left translation { TourneGauche(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } else if('R' == cmd) //Bluetooth received the string R, car right translation { TourneDroite(); //right translation delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } else if('S' == serialData) //When the string S is received, the cart stops moving { arret(); } else if('D' == serialData) { DemiTourDroite(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } else if('G' == serialData) { Demo(); delay(tempo10); cmd ='S'; serialData = 'S'; arret(); } } void setup() { Serial.begin(9600); pinMode(Trig,OUTPUT);//The Trig pin connected to the ultrasound is set to output mode pinMode(Echo,INPUT);//The Echo pin connected to the ultrasound is set to input mode void Motor(int Dri,int Speed1,int Speed2,int Speed3,int Speed4); int SR04(int Trig,int Echo); void AvoidingObstacles(); void HC05(); } void loop() { //distance = SR04(Trig,Echo); //Acquisition of ultrasonic distance HC05(); //Call the Bluetooth car control function }
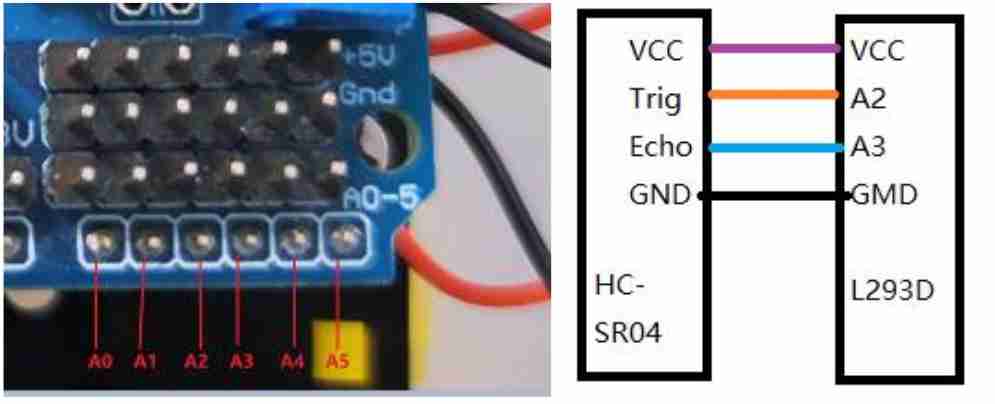
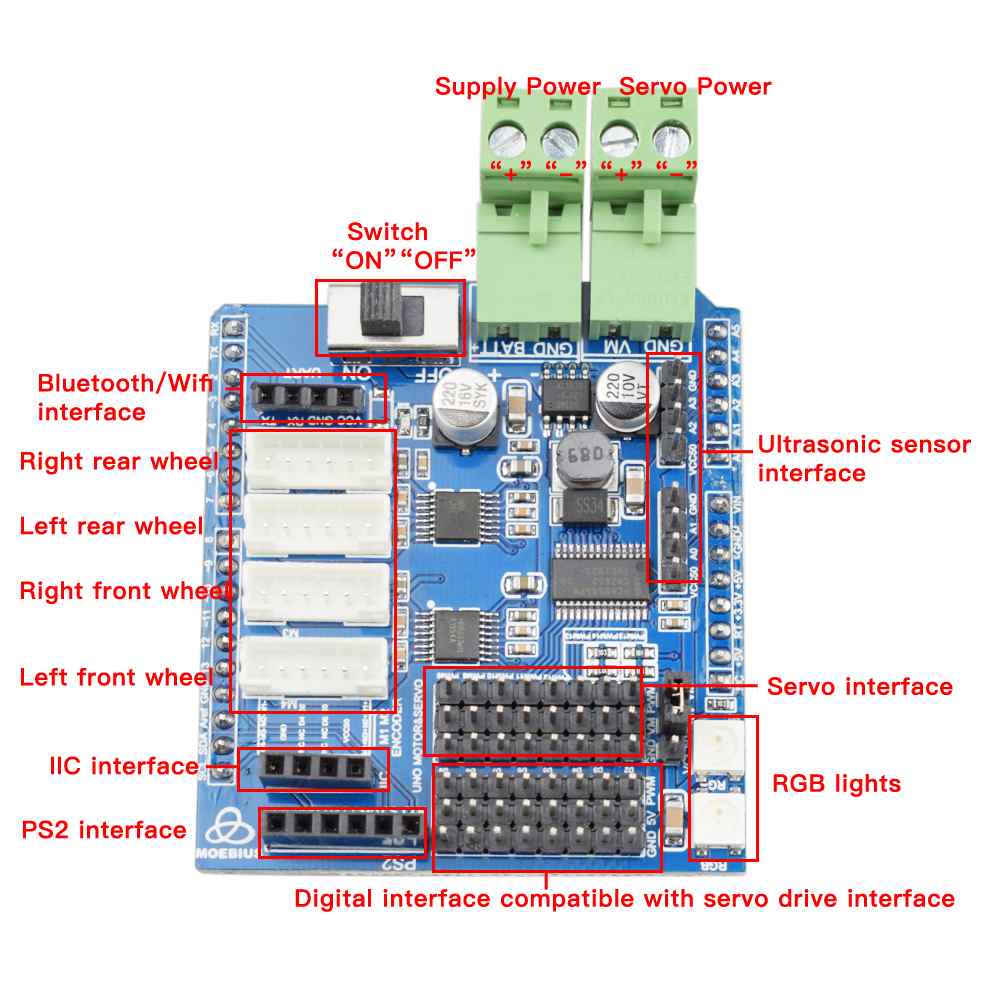
Cablage Robot Mecanum
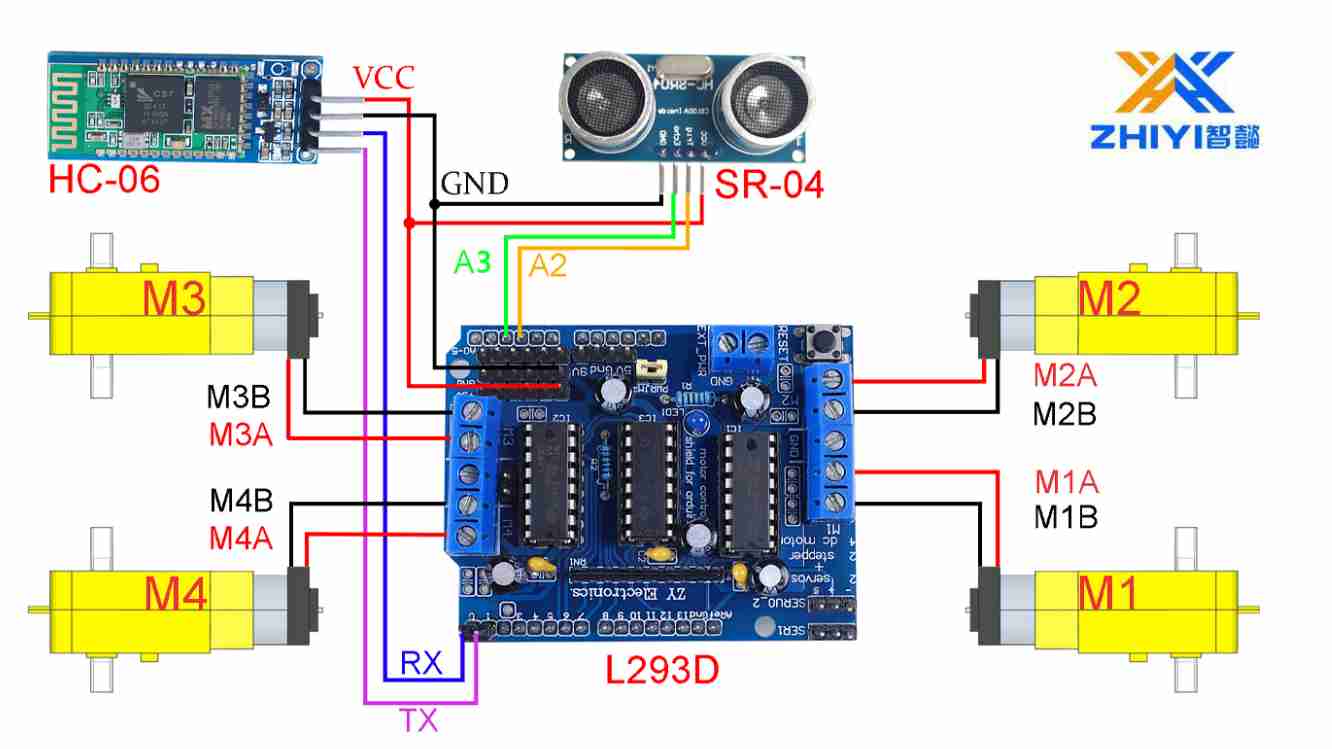
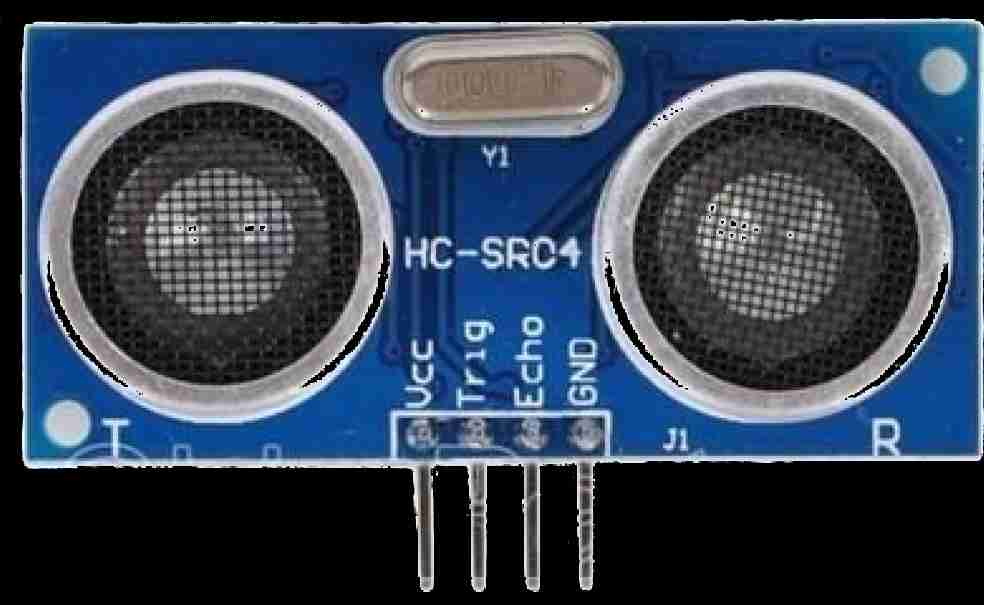
Cablage SR04
Robot Mecanum commandé via PS2 sans fil
programme1 test mecanum PS2
- mecanum-test001.ino
//programme en cours de test par GL le 13/12/2022 #include <PS2X_lib.h> //for MOEBIUS #include "FaBoPWM_PCA9685.h" //#include "servo.hpp" FaBoPWM faboPWM; int pos = 0; int MAX_VALUE = 2000; // motor Motor_PWM int MIN_VALUE = 300; //PS2手柄引脚;PS2 handle Pin #define PS2_DAT 13 #define PS2_CMD 11 #define PS2_SEL 10 #define PS2_CLK 12 //MOTOR CONTROL Pin #define DIRA1 0 #define DIRA2 1 #define DIRB1 2 #define DIRB2 3 #define DIRC1 4 #define DIRC2 5 #define DIRD1 6 #define DIRD2 7 char speed; // #define pressures true #define pressures false // #define rumble true #define rumble false PS2X ps2x; // create PS2 Controller Class //right now, the library does NOT support hot pluggable controllers, meaning //you must always either restart your Arduino after you connect the controller, //or call config_gamepad(pins) again after connecting the controller. int error = 0; byte type = 0; byte vibrate = 0; void (* resetFunc) (void) = 0; //电机控制,前进、后退、停止 motor control advance\back\stop #define MOTORA_FORWARD(pwm) do{faboPWM.set_channel_value(DIRA1,pwm);faboPWM.set_channel_value(DIRA2, 0);}while(0) #define MOTORA_STOP(x) do{faboPWM.set_channel_value(DIRA1,0);faboPWM.set_channel_value(DIRA2, 0);}while(0) #define MOTORA_BACKOFF(pwm) do{faboPWM.set_channel_value(DIRA1,0);faboPWM.set_channel_value(DIRA2, pwm);}while(0) #define MOTORB_FORWARD(pwm) do{faboPWM.set_channel_value(DIRB1,pwm);faboPWM.set_channel_value(DIRB2, 0);}while(0) #define MOTORB_STOP(x) do{faboPWM.set_channel_value(DIRB1,0);faboPWM.set_channel_value(DIRB2, 0);}while(0) #define MOTORB_BACKOFF(pwm) do{faboPWM.set_channel_value(DIRB1,0);faboPWM.set_channel_value(DIRB2, pwm);}while(0) #define MOTORC_FORWARD(pwm) do{faboPWM.set_channel_value(DIRC1,pwm);faboPWM.set_channel_value(DIRC2, 0);}while(0) #define MOTORC_STOP(x) do{faboPWM.set_channel_value(DIRC1,0);faboPWM.set_channel_value(DIRC2, 0);}while(0) #define MOTORC_BACKOFF(pwm) do{faboPWM.set_channel_value(DIRC1,0);faboPWM.set_channel_value(DIRC2, pwm);}while(0) #define MOTORD_FORWARD(pwm) do{faboPWM.set_channel_value(DIRD1,pwm);faboPWM.set_channel_value(DIRD2, 0);}while(0) #define MOTORD_STOP(x) do{faboPWM.set_channel_value(DIRD1,0);faboPWM.set_channel_value(DIRD2, 0);}while(0) #define MOTORD_BACKOFF(pwm) do{faboPWM.set_channel_value(DIRD1,0);faboPWM.set_channel_value(DIRD2, pwm);}while(0) #define SERIAL Serial //#define SERIAL Serial3 #define LOG_DEBUG #ifdef LOG_DEBUG #define M_LOG SERIAL.print #else #define M_LOG #endif //PWM参数 #define MAX_PWM 2000 #define MIN_PWM 300 int Motor_PWM = 1900; int Motor_PWM_mod = Motor_PWM - 400; //------AVANCE-------------------------------------------------------------------- // ↑A-----B↑ // | ↑ | // | | | // ↑C-----D↑ void ADVANCE(uint8_t pwm_A,uint8_t pwm_B,uint8_t pwm_C,uint8_t pwm_D) { MOTORA_FORWARD(Motor_PWM_mod); MOTORB_FORWARD(Motor_PWM); MOTORC_FORWARD(Motor_PWM_mod); MOTORD_FORWARD(Motor_PWM); } //-------RECUL------------------------------------------------------------------------ // ↓A-----B↓ // | | | // | ↓ | // ↓C-----D↓ void BACK() { MOTORA_BACKOFF(Motor_PWM_mod);MOTORB_BACKOFF(Motor_PWM); MOTORC_BACKOFF(Motor_PWM_mod);MOTORD_BACKOFF(Motor_PWM); } //-------GAUCHE AVANT------------------------------------------------------------------------ // =B-----A↑ // | ↖ | // | ↖ | // ↑C-----D= void LEFT_1() { MOTORA_FORWARD(Motor_PWM);MOTORB_STOP(Motor_PWM); MOTORC_FORWARD(Motor_PWM);MOTORD_STOP(Motor_PWM); } //-------GAUCHE--------------------------------------------------------------------------- // // // ↓A-----B↑ // | ← | // | ← | // ↑C-----D↓ void LEFT_2() { MOTORA_BACKOFF(Motor_PWM);MOTORB_FORWARD(Motor_PWM); MOTORC_FORWARD(Motor_PWM);MOTORD_BACKOFF(Motor_PWM); } //---------GAUCHE ARRIERE---------------------------------------------------------------------------- // // // ↓A-----B= // | ↙ | // | ↙ | // =C-----D↓ void LEFT_3() { MOTORA_BACKOFF(Motor_PWM);MOTORB_STOP(Motor_PWM); MOTORC_STOP(Motor_PWM);MOTORD_BACKOFF(Motor_PWM); } //-----------DROITE AVANT----------------------------------------------------------------------- // ↑A-----B= // | ↗ | // | ↗ | // =C-----D↑ void RIGHT_1() { MOTORA_FORWARD(Motor_PWM);MOTORB_STOP(Motor_PWM); MOTORC_STOP(Motor_PWM);MOTORD_FORWARD(Motor_PWM); } //--------------DROITE----------------------------------------------------------------------- // ↑A-----B↓ // | → | // | → | // ↓C-----D↑ void RIGHT_2() { MOTORA_FORWARD(Motor_PWM);MOTORB_BACKOFF(Motor_PWM); MOTORC_BACKOFF(Motor_PWM);MOTORD_FORWARD(Motor_PWM); } //-----------------DROITE ARRIERE-------------------------------------------------------------- // =A-----B↓ // | ↘ | // | ↘ | // ↓C-----D= void RIGHT_3() { MOTORA_STOP(Motor_PWM);MOTORB_BACKOFF(Motor_PWM); MOTORC_BACKOFF(Motor_PWM);MOTORD_STOP(Motor_PWM); } //---------------------TOURNE---DROITE------------------------------------------------------- // ↑A-----B↓ // | ↗ ↘ | // | ↖ ↙ | // ↑C-----D↓ void rotate_1() //tate_1(uint8_t pwm_A,uint8_t pwm_B,uint8_t pwm_C,uint8_t pwm_D) { MOTORA_FORWARD(Motor_PWM);MOTORB_BACKOFF(Motor_PWM); MOTORC_FORWARD(Motor_PWM);MOTORD_BACKOFF(Motor_PWM); } //----------------------TOURNE GAUCHE---------------------------------------------------------- // ↓A-----B↑ // | ↙ ↖ | // | ↘ ↗ | // ↓C-----D↑ void rotate_2() // rotate_2(uint8_t pwm_A,uint8_t pwm_B,uint8_t pwm_C,uint8_t pwm_D) { MOTORA_BACKOFF(Motor_PWM);MOTORB_FORWARD(Motor_PWM); MOTORC_BACKOFF(Motor_PWM);MOTORD_FORWARD(Motor_PWM); } //---------------------------ARRET------------------------------------------------------- // =A-----B= // | = | // | = | // =C-----D= void STOP() { MOTORA_STOP(Motor_PWM);MOTORB_STOP(Motor_PWM); MOTORC_STOP(Motor_PWM);MOTORD_STOP(Motor_PWM); } //----------------------------------------------------------------------------------- void UART_Control() { char Uart_Date=0; if(SERIAL.available()) { Uart_Date = SERIAL.read(); } switch(Uart_Date) { case 'A': ADVANCE(500,500,500,500); M_LOG("Run!\r\n"); break; case 'B': RIGHT_1(); M_LOG("Right up!\r\n"); break; case 'C': rotate_2(); break; case 'D': RIGHT_3(); M_LOG("Right down!\r\n"); break; case 'E': BACK(); M_LOG("Run!\r\n"); break; case 'F': LEFT_3(); M_LOG("Left down!\r\n"); break; case 'G': rotate_1(); break; case 'H': LEFT_1(); M_LOG("Left up!\r\n"); break; case 'Z': STOP(); M_LOG("Stop!\r\n"); break; case 'z': STOP(); M_LOG("Stop!\r\n"); break; case 'd': LEFT_2(); M_LOG("Left!\r\n"); break; case 'b': RIGHT_2(); M_LOG("Right!\r\n"); break; case 'L': Motor_PWM = 1500; break; case 'M': Motor_PWM = 500; break; } } void IO_init() { STOP(); } void setup() { IO_init(); SERIAL.begin(9600); if(faboPWM.begin()) { Serial.println("Find PCA9685"); faboPWM.init(300); } faboPWM.set_hz(50); SERIAL.print("Start"); delay(300) ; //added delay to give wireless ps2 module some time to startup, before configuring it //CHANGES for v1.6 HERE!!! **************PAY ATTENTION************* //setup pins and settings: GamePad(clock, command, attention, data, Pressures?, Rumble?) check for error error = ps2x.config_gamepad(PS2_CLK, PS2_CMD, PS2_SEL, PS2_DAT, pressures, rumble); if (error == 0) { Serial.print("Found Controller, configured successful "); Serial.print("pressures = "); if (pressures) Serial.println("true "); else Serial.println("false"); Serial.print("rumble = "); if (rumble) Serial.println("true)"); else Serial.println("false"); Serial.println("Try out all the buttons, X will vibrate the controller, faster as you press harder;"); Serial.println("holding L1 or R1 will print out the analog stick values."); Serial.println("Note: Go to www.billporter.info for updates and to report bugs."); } else if (error == 1) { Serial.println("No controller found, check wiring, see readme.txt to enable debug. visit www.billporter.info for troubleshooting tips"); resetFunc(); } else if (error == 2) Serial.println("Controller found but not accepting commands. see readme.txt to enable debug. Visit www.billporter.info for troubleshooting tips"); else if (error == 3) Serial.println("Controller refusing to enter Pressures mode, may not support it. "); // Serial.print(ps2x.Analog(1), HEX); type = ps2x.readType(); switch (type) { case 0: Serial.print("Unknown Controller type found "); break; case 1: Serial.print("DualShock Controller found "); break; case 2: Serial.print("GuitarHero Controller found "); break; case 3: Serial.print("Wireless Sony DualShock Controller found "); break; } } void loop() { // UART_Control(); //CAR_Control(); /* You must Read Gamepad to get new values and set vibration values ps2x.read_gamepad(small motor on/off, larger motor strenght from 0-255) if you don't enable the rumble, use ps2x.read_gamepad(); with no values You should call this at least once a second */ if (error == 1) //skip loop if no controller found return; if (type == 2) { //Guitar Hero Controller return; } else { //DualShock Controller ps2x.read_gamepad(false, vibrate); //read controller and set large motor to spin at 'vibrate' Motor_PWM //start if (ps2x.Button(PSB_START)) { Serial.println("Start is being held"); ADVANCE(500,500,500,500); } if (ps2x.Button(PSB_PAD_UP)) { Serial.println("Up held this hard: "); ADVANCE(500,500,500,500); } if (ps2x.Button(PSB_PAD_DOWN)) { Serial.print("Down held this hard: "); BACK(); } if (ps2x.Button(PSB_PAD_LEFT)) { Serial.println("turn left "); LEFT_2(); } if (ps2x.Button(PSB_PAD_RIGHT)) { Serial.println("turn right"); RIGHT_2(); } // Stop if (ps2x.Button(PSB_SELECT)) { Serial.println("stop"); STOP(); } // 左平移 if (ps2x.Button(PSB_PINK)) { Serial.println("motor_pmove_left"); LEFT_1(); } if (ps2x.Button(PSB_RED)) { Serial.println("motor_pmove_right"); RIGHT_1(); } delay(20); } if (ps2x.Button(PSB_L1) || ps2x.Button(PSB_R1)) { //print stick values if either is TRUE Serial.print("Stick Values:"); Serial.print(ps2x.Analog(PSS_LY), DEC); //Left stick, Y axis. Other options: LX, RY, RX Serial.print(","); Serial.print(ps2x.Analog(PSS_LX), DEC); Serial.print(","); Serial.print(ps2x.Analog(PSS_RY), DEC); Serial.print(","); Serial.println(ps2x.Analog(PSS_RX), DEC); int LY = ps2x.Analog(PSS_LY); int LX = ps2x.Analog(PSS_LX); int RY = ps2x.Analog(PSS_RY); int RX = ps2x.Analog(PSS_RX); if (LY < 127) { // Motor_PWM = 1.5 * (127 - LY); ADVANCE(500,500,500,500); //Motor_PWM = 1.5 * (127 - LX); delay(20); Serial.print("ADVANCE"); } if (LY > 127) { //Motor_PWM = 1.5 * (LY - 128); BACK(); delay(20); Serial.print("ARRIERE"); } if (LX < 128) { //Motor_PWM = 1.5 * (127 - LX); LEFT_2(); delay(20); Serial.print("LEFT_2"); } if (LX > 128) { //Motor_PWM = 1.5 * (LX - 128); RIGHT_2(); delay(20); Serial.print("RIGHT_2"); } if (LY == 127 && LX == 128) { STOP(); delay(20); } } }