
Ceci est une ancienne révision du document !
Table des matières
VL53LXXV2
Doc
Le télémètre laser VL53L1X Arduino est un capteur permettant de mesurer la distance d’un obstacle jusqu’à 4 mètres de distance avec une longueur d’onde de 940 nm (inoffensif pour les yeux). Les modules télémétriques VL53L0X, moins chers, ont une portée de seulement 2 mètres.
Fonctionnement télémètre laser VL53L1X / VL53LOX
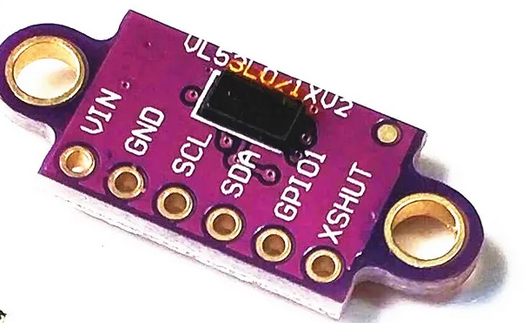
Les capteurs GY-53-L1X et VL53LOX possèdent 6 connecteurs, mais seules 4 broches sont nécessaires. Deux connecteurs sont utilisés pour l’alimentation et deux autres connecteurs sont utilisés pour la communication I2C. Par défaut, VL53L1X est configuré en mode « longue portée » jusqu’à 4m. En utilisant la bibliothèque SparkFun_VL53L1X.h, tu peux configurer un mode de mesure « courte portée » plus précis avec une portée d’environ 2 mètres.
Caractéristiques VL53L1X, VL53LOX Arduino:
- Alimentation: 3,3 ou 5 Vcc
- Adresse I2C: 0x29
- Champ de vision: 27°
- Plage de mesure: 4 à 400 cm
- Précision: ± 25 mm (± 20 dans l’obscurité)
L’angle de vue par défaut du capteur est de 27°. Dans certains cas, la précision du capteur peut être affectée par des obstacles situés à la périphérie. L’angle de vue peut être réduit en contrôlant la zone ROI (ROI: region of interest). Le capteur consiste en une matrice de 16 X 16 éléments, et le contrôle de la zone ROI consiste à activer une partie des éléments. Le faisceau le plus étroit est obtenu en activant la partie de la matrice constituée de 4 X 4 éléments.