
start:arduino:pasapas:nema
Table des matières
Les moteurs pas à pas Nema ...
Cablage moteur Pas à Pas

Il faut d'abord reperer les enroulements du moteur ,
Exemple dans mon cas, coté moteur connecteur face à vous l'axe sur le haut

Rouge , Noir, Bleu, Vert.
L'enroulement 1 est sur les fils Rouge , Bleu
L'euroulement 2 est sur les fils Noir , Vert
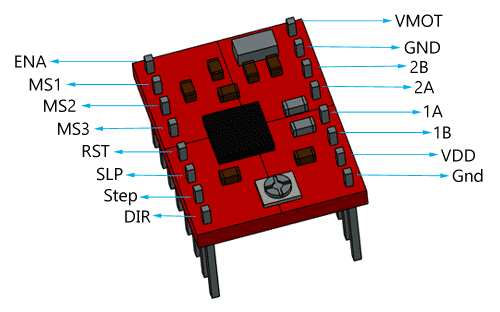
donc sur le driver moteur , on branche Rouge sur 2B et Bleu sur 2A , et Noir sur 1B et Vert sur 1A
On peut avoir à inverser un ou deux enroulements suivant le fonctionnement ou non du moteur.
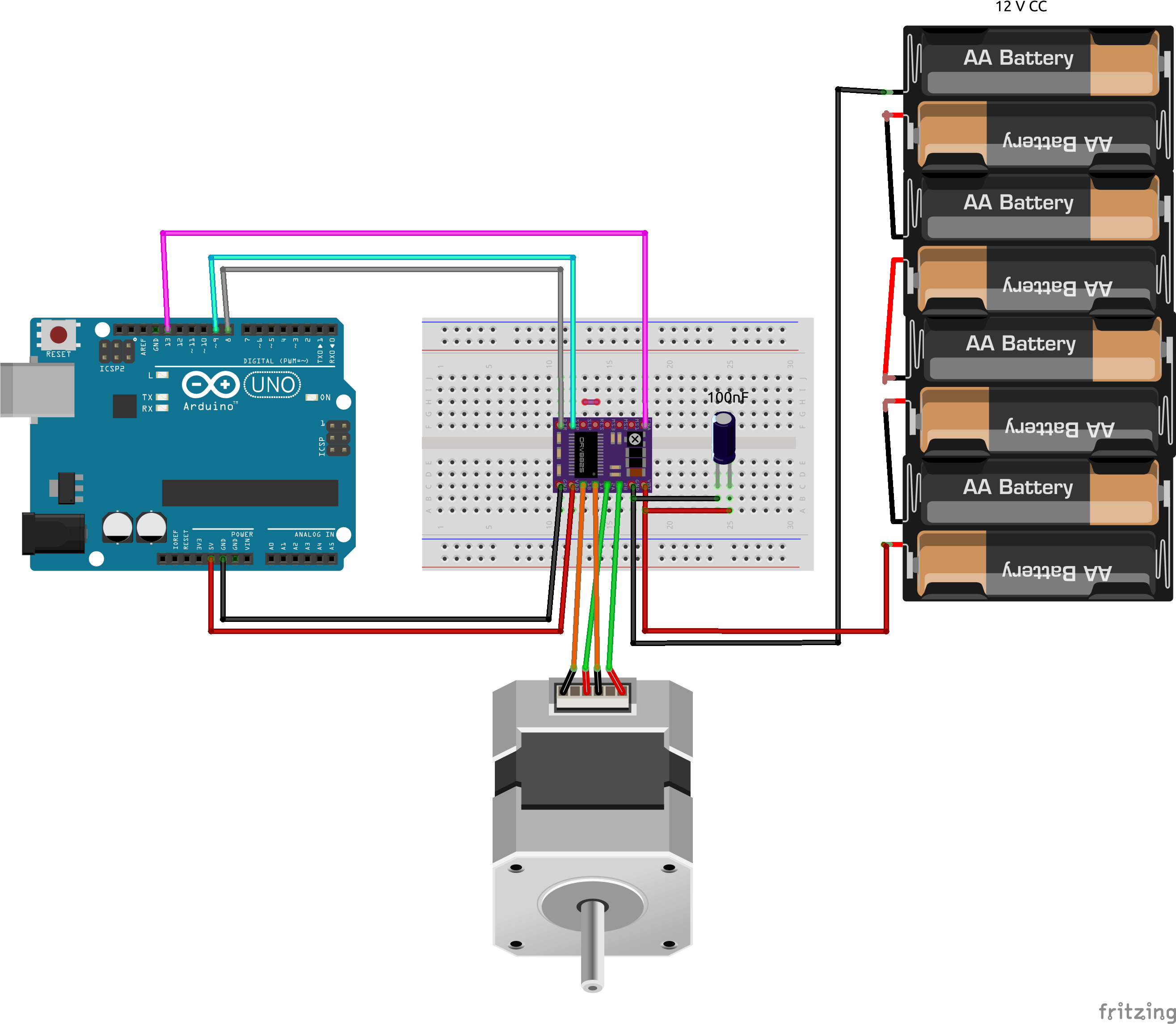
Schema
Programme de Test du moteur Nema 17
- moteurpaspas.ino
// A4988_Test.ino // // Commande d'un moteur pas-à-pas à l'aide d'un pilote A4988 avec // Arduino. // // Un projet www.mchobby.be (vente de kit et composant) // Meurisse D. - Licence CC-SA-BY // // Un tutoriel http://mchobby.be/wiki/index.php?title=A4988 // Ou Acheter un StepStick A4988 // http://shop.mchobby.be/product.php?id_product=349 // #define pinEnable 13 // Activation du driver/pilote #define pinStep 9 // Signal de PAS (avancement) #define pinDir 8 // Direction void setup(){ Serial.begin(9600); Serial.println("Test A4988"); pinMode( pinEnable, OUTPUT ); pinMode( pinDir , OUTPUT ); pinMode( pinStep , OUTPUT ); } void loop(){ int i = 0; digitalWrite( pinDir , HIGH); // Direction avant digitalWrite( pinStep , LOW); // Initialisation de la broche step // Avance de 200 pas for( i=0; i<200; i++){ Serial.println( i ); digitalWrite( pinStep, HIGH ); delay( 10 ); digitalWrite( pinStep, LOW ); delay( 10 ); } // Changer de direction digitalWrite( pinDir , LOW); // Direction avant // Refaire 200 pas dans l'autre sens for( i=0; i<200; i++){ Serial.println( i ); digitalWrite( pinStep, HIGH ); delay( 1 ); digitalWrite( pinStep, LOW ); delay( 1 ); } // Pas de step et pas d'ordre... // l'axe du moteur est donc bloqué Serial.println("Axe bloqué + attendre 5 sec"); delay( 5000 ); // déblocage de l'axe moteur Serial.println("Deblocage axe"); //digitalWrite( pinEnable, HIGH ); // logique inversée // Fin et blocage du programme // Presser reset pour recommander Serial.println("Fin de programme"); //while( true ); }
/home/chanteri/www/fablab37110/data/pages/start/arduino/pasapas/nema.txt · Dernière modification : 2024/02/03 10:56 de gerardadmin